This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I tried to do the same using a basic video.
There is maybe a better solution but this is how I did to stitch the images (maybe this could help you):
To copy/paste the images, in pseudo-code:
for each new image {
//Get the new image
capture >> img_cur
//Copy the current panorama into panoramaCur
cv::Mat panoramaCur;
panorama.copyTo(panoramaCur);
//panoramaSize: new panorama size
//Warp and copy img_cur into panoramaCur using the homography H
cv::warpPerspective(img_cur, panoramaCur, H_curto1, panoramaSize);
//ROI for the previous panorama
cv::Mat half(panoramaCur, cv::Rect(0, 0, panorama.cols, panorama.rows));
panorama.copyTo(half);
//Get the new panorama result
panoramaCur.copyTo(panorama);
}
Finally, the result in video.
| | 2 | No.2 Revision |
I tried to do the same using a basic video.
There is maybe a better solution but this is how I did to stitch the images (maybe this could help you):
To copy/paste the images, in pseudo-code:
for each new image {
//Get the new image
capture >> img_cur
//Copy the current panorama into panoramaCur
cv::Mat panoramaCur;
panorama.copyTo(panoramaCur);
//panoramaSize: new panorama size
//Warp and copy img_cur into panoramaCur using the homography H
cv::warpPerspective(img_cur, panoramaCur, H_curto1, panoramaSize);
//ROI for the previous panorama
cv::Mat half(panoramaCur, cv::Rect(0, 0, panorama.cols, panorama.rows));
panorama.copyTo(half);
//Get the new panorama result
panoramaCur.copyTo(panorama);
}
Finally, the result in video.
Edit:
First of all, it is the first time I "play" with image stitching so the method I present is not necessarily good or optimal. I think that the problem you encounter is that some pixels in the original image are warped in negative coordinates.
In your case, it seems that the view is shot from an UAV. I think that the easiest solution is to divide the mosaic image in a grid of 3x3. The central part will show always the current image. There will be always some free space for the result of the warping.
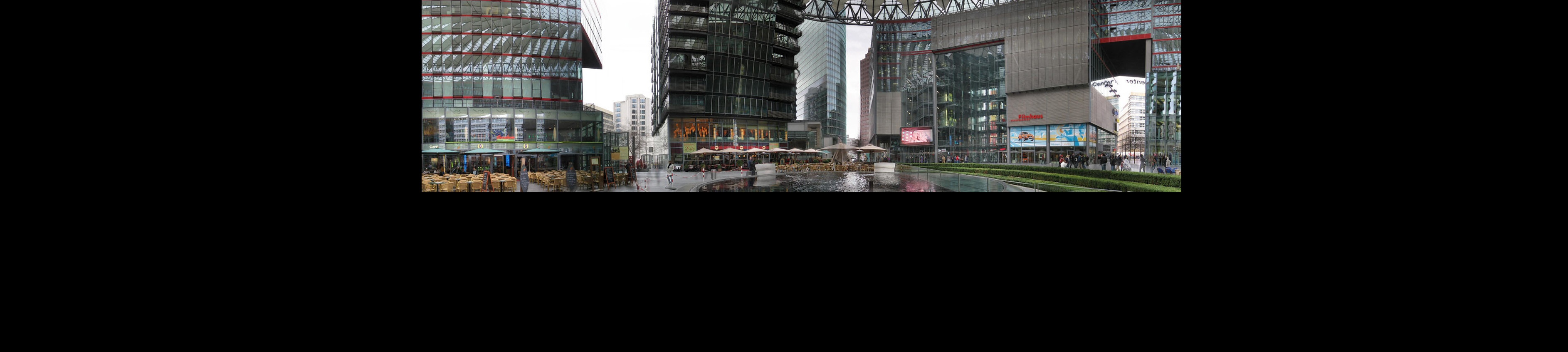
Some test I made (tl:dr). For example, with the two images below:


If we warp the image 2, some pixels will not be shown (e.g. the roof):
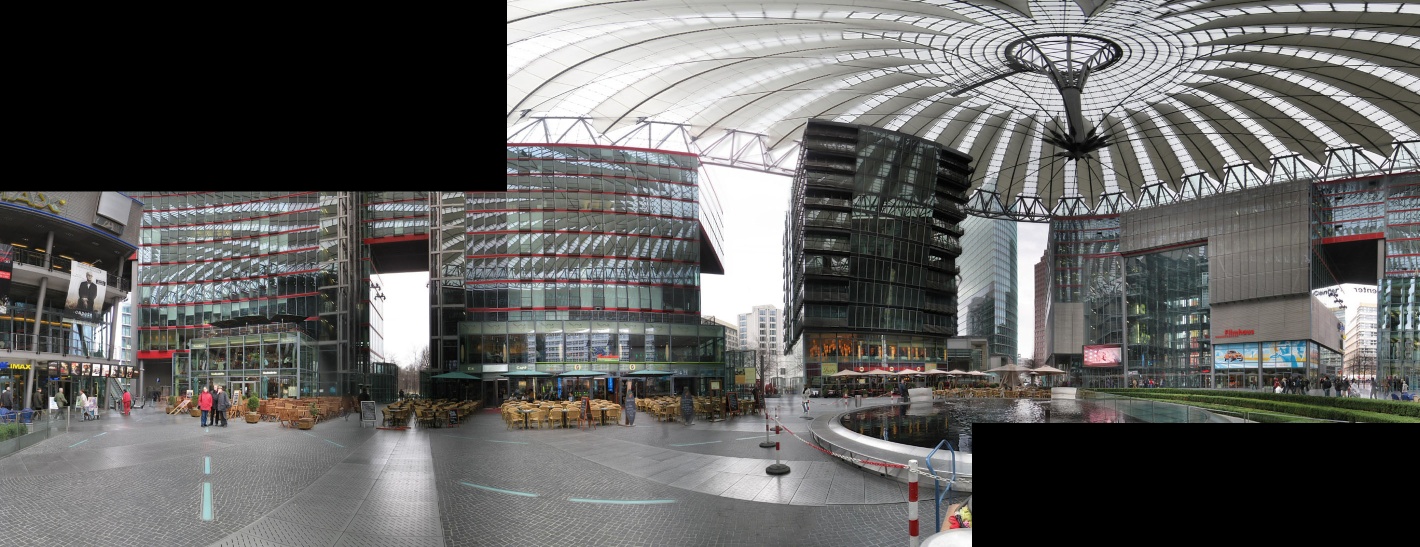
The stitching will look like this:

In fact, if we print the homography matrix:
double homography[3][3] = {
{0.999953365335864, -0.0001669222180845182, 507.0299576823942},
{5.718816824900338e-05, 0.9999404263126825, -191.9941904903286},
{1.206803293748564e-08, -1.563550523469747e-07, 1},
};
we can see that the translation in y is negative.
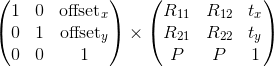
My solution would be to put 0 for t_x or t_y if they are negative for the homography matrix and use it to warp the image. After, I paste the first image not in (0,0) but in (offsetX, offsetY):
You can also calculate the new coordinates of the image after the warping using perspectiveTransform:
std::vector<cv::Point2f> corners(4);
corners[0] = cv::Point2f(0, 0);
corners[1] = cv::Point2f(0, img2.rows);
corners[2] = cv::Point2f(img2.cols, 0);
corners[3] = cv::Point2f(img2.cols, img2.rows);
std::vector<cv::Point2f> cornersTransform(4);
cv::perspectiveTransform(corners, cornersTransform, H);
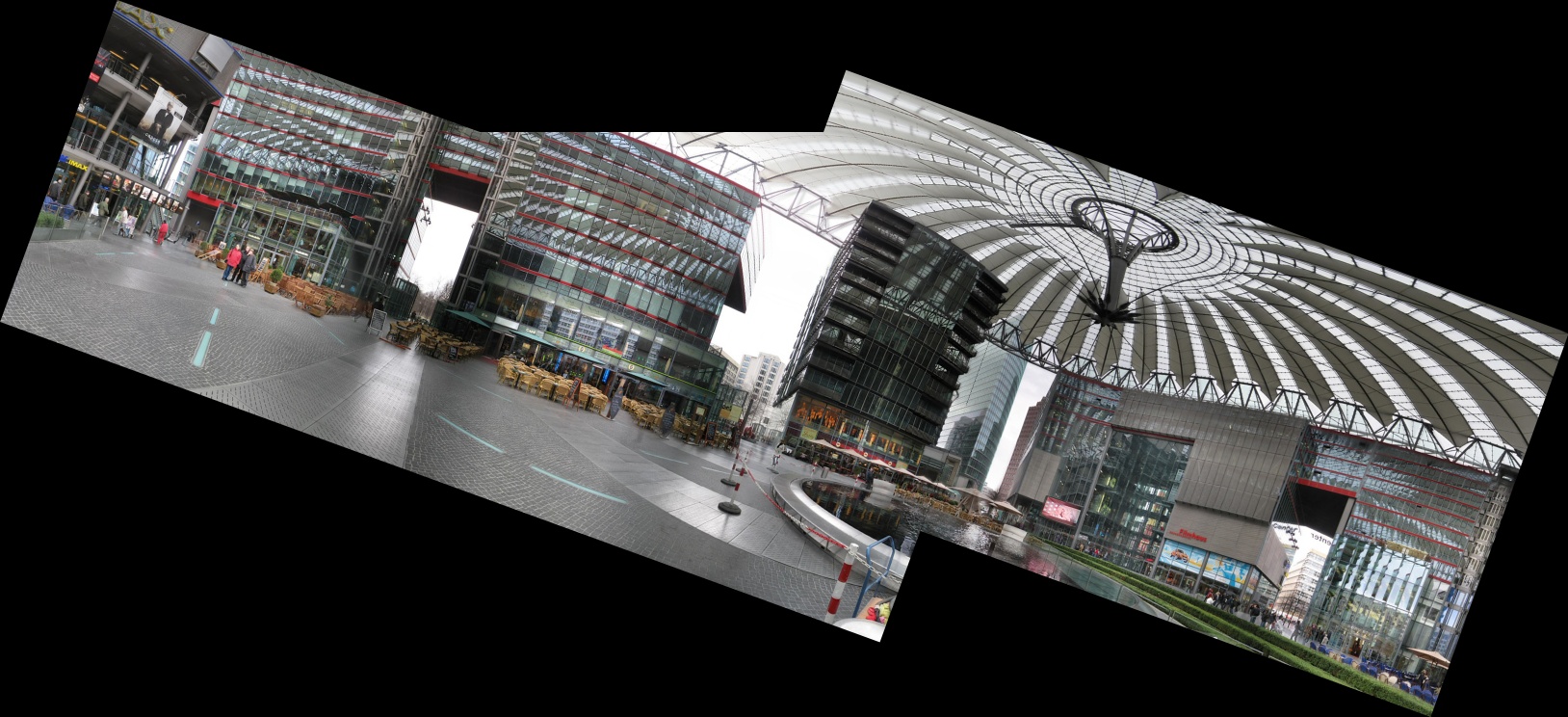
Finally, the result of the stitching I can successfully process:

| | 3 | No.3 Revision |
I tried to do the same using a basic video.
There is maybe a better solution but this is how I did to stitch the images (maybe this could help you):
To copy/paste the images, in pseudo-code:
for each new image {
//Get the new image
capture >> img_cur
//Copy the current panorama into panoramaCur
cv::Mat panoramaCur;
panorama.copyTo(panoramaCur);
//panoramaSize: new panorama size
//Warp and copy img_cur into panoramaCur using the homography H
cv::warpPerspective(img_cur, panoramaCur, H_curto1, panoramaSize);
//ROI for the previous panorama
cv::Mat half(panoramaCur, cv::Rect(0, 0, panorama.cols, panorama.rows));
panorama.copyTo(half);
//Get the new panorama result
panoramaCur.copyTo(panorama);
}
Finally, the result in video.
Edit:
First of all, it is the first time I "play" with image stitching so the method I present is not necessarily good or optimal. I think that the problem you encounter is that some pixels in the original image are warped in negative coordinates.
In your case, it seems that the view is shot from an UAV. I think that the easiest solution is to divide the mosaic image in a grid of 3x3. The central part will show always the current image. There will be always some free space for the result of the warping.
Some test I made (tl:dr). For example, with the two images below:
If we warp the image 2, some pixels will not be shown (e.g. the roof):
The stitching will look like this:
In fact, if we print the homography matrix:
double homography[3][3] = {
{0.999953365335864, -0.0001669222180845182, 507.0299576823942},
{5.718816824900338e-05, 0.9999404263126825, -191.9941904903286},
{1.206803293748564e-08, -1.563550523469747e-07, 1},
};
we can see that the translation in y is negative.
My solution would be to put 0 for t_x or t_y if they are negative for the homography matrix and use it to warp the After, I paste the first image not in (0,0) but in (offsetX, offsetY):image. image.
You can also calculate the new coordinates of the image after the warping using perspectiveTransform:
std::vector<cv::Point2f> corners(4);
corners[0] = cv::Point2f(0, 0);
corners[1] = cv::Point2f(0, img2.rows);
corners[2] = cv::Point2f(img2.cols, 0);
corners[3] = cv::Point2f(img2.cols, img2.rows);
std::vector<cv::Point2f> cornersTransform(4);
cv::perspectiveTransform(corners, cornersTransform, H);
Finally, the result of the stitching I can successfully process:
Edit 2:
In fact, setting the translation part to zero in the homography matrix part is not right. It worked in my previous case because there was almost no rotation, only translation. The correct way is to first calculate the maximum offset in x and y (the maximum negative values) for the part outside of the image using perspectiveTransform.
Then, we can premultiply the homography matrix H with another matrix to get all the pixel coordinates in the positive:
cv::warpPerspective(img2, panorama, H2*H, size_warp);
| | 4 | No.4 Revision |
I tried to do the same using a basic video.
There is maybe a better solution but this is how I did to stitch the images (maybe this could help you):
To copy/paste the images, in pseudo-code:
for each new image {
//Get the new image
capture >> img_cur
//Copy the current panorama into panoramaCur
cv::Mat panoramaCur;
panorama.copyTo(panoramaCur);
//panoramaSize: new panorama size
//Warp and copy img_cur into panoramaCur using the homography H
cv::warpPerspective(img_cur, panoramaCur, H_curto1, panoramaSize);
//ROI for the previous panorama
cv::Mat half(panoramaCur, cv::Rect(0, 0, panorama.cols, panorama.rows));
panorama.copyTo(half);
//Get the new panorama result
panoramaCur.copyTo(panorama);
}
Finally, the result in video.
Edit:
First of all, it is the first time I "play" with image stitching so the method I present is not necessarily good or optimal. I think that the problem you encounter is that some pixels in the original image are warped in negative coordinates.
In your case, it seems that the view is shot from an UAV. I think that the easiest solution is to divide the mosaic image in a grid of 3x3. The central part will show always the current image. There will be always some free space for the result of the warping.
Some test I made (tl:dr). For example, with the two images below:
If we warp the image 2, some pixels will not be shown (e.g. the roof):
The stitching will look like this:
In fact, if we print the homography matrix:
double homography[3][3] = {
{0.999953365335864, -0.0001669222180845182, 507.0299576823942},
{5.718816824900338e-05, 0.9999404263126825, -191.9941904903286},
{1.206803293748564e-08, -1.563550523469747e-07, 1},
};
we can see that the translation in y is negative.
My solution would be to put 0 for t_x or t_y if they are negative for the homography matrix and use it to warp the image. After, I paste the first image not in (0,0) but in (offsetX, offsetY):
You can also calculate the new coordinates of the image after the warping using perspectiveTransform:
std::vector<cv::Point2f> corners(4);
corners[0] = cv::Point2f(0, 0);
corners[1] = cv::Point2f(0, img2.rows);
corners[2] = cv::Point2f(img2.cols, 0);
corners[3] = cv::Point2f(img2.cols, img2.rows);
std::vector<cv::Point2f> cornersTransform(4);
cv::perspectiveTransform(corners, cornersTransform, H);
Finally, the result of the stitching I can successfully process:
Edit 2:
In fact, setting the translation part to zero in the homography matrix part is not right. It worked in my previous case because there was almost no rotation, only translation. The correct way is to first calculate the maximum offset in x and y (the maximum negative values) for the part outside of the image using perspectiveTransform.
Then, we can premultiply the homography matrix H with another matrix to get all the pixel coordinates in the positive:
cv::warpPerspective(img2, panorama, H2*H, size_warp);
Edit 3:
The code I used for my image stitching tests, it is not perfect but it do almost what I want (it should be fully functional):
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
cv::Mat stitch(const cv::Mat &img1, const cv::Mat &img2, cv::Mat &mask, const cv::Mat &H) {
//Coordinates of the 4 corners of the image
std::vector<cv::Point2f> corners(4);
corners[0] = cv::Point2f(0, 0);
corners[1] = cv::Point2f(0, img2.rows);
corners[2] = cv::Point2f(img2.cols, 0);
corners[3] = cv::Point2f(img2.cols, img2.rows);
std::vector<cv::Point2f> cornersTransform(4);
cv::perspectiveTransform(corners, cornersTransform, H);
double offsetX = 0.0;
double offsetY = 0.0;
//Get max offset outside of the image
for(size_t i = 0; i < 4; i++) {
std::cout << "cornersTransform[" << i << "]=" << cornersTransform[i] << std::endl;
if(cornersTransform[i].x < offsetX) {
offsetX = cornersTransform[i].x;
}
if(cornersTransform[i].y < offsetY) {
offsetY = cornersTransform[i].y;
}
}
offsetX = -offsetX;
offsetY = -offsetY;
std::cout << "offsetX=" << offsetX << " ; offsetY=" << offsetY << std::endl;
//Get max width and height for the new size of the panorama
double maxX = std::max((double) img1.cols+offsetX, (double) std::max(cornersTransform[2].x, cornersTransform[3].x)+offsetX);
double maxY = std::max((double) img1.rows+offsetY, (double) std::max(cornersTransform[1].y, cornersTransform[3].y)+offsetY);
std::cout << "maxX=" << maxX << " ; maxY=" << maxY << std::endl;
cv::Size size_warp(maxX, maxY);
cv::Mat panorama(size_warp, CV_8UC3);
//Create the transformation matrix to be able to have all the pixels
cv::Mat H2 = cv::Mat::eye(3, 3, CV_64F);
H2.at<double>(0,2) = offsetX;
H2.at<double>(1,2) = offsetY;
cv::warpPerspective(img2, panorama, H2*H, size_warp);
//ROI for img1
cv::Rect img1_rect(offsetX, offsetY, img1.cols, img1.rows);
cv::Mat half;
//First iteration
if(mask.empty()) {
//Copy img1 in the panorama using the ROI
cv::Mat half = cv::Mat(panorama, img1_rect);
img1.copyTo(half);
//Create the new mask matrix for the panorama
mask = cv::Mat::ones(img2.size(), CV_8U)*255;
cv::warpPerspective(mask, mask, H2*H, size_warp);
cv::rectangle(mask, img1_rect, cv::Scalar(255), -1);
} else {
cv::Mat maskTmp = cv::Mat::zeros(size_warp, img1.type());
half = cv::Mat(maskTmp, img1_rect);
img1.copyTo(half);
//Copy only pixel with intensity != 0 in panorama
maskTmp.copyTo(panorama, maskTmp);
//Create a mask for the warped part
maskTmp = cv::Mat::ones(img2.size(), CV_8U)*255;
cv::warpPerspective(maskTmp, maskTmp, H2*H, size_warp);
cv::Mat maskTmp2 = cv::Mat::zeros(size_warp, CV_8U);
half = cv::Mat(maskTmp2, img1_rect);
//Copy the old mask in maskTmp2
mask.copyTo(half);
//Merge the old mask with the new one
maskTmp += maskTmp2;
maskTmp.copyTo(mask);
}
return panorama;
}
int main(int argc, char **argv) {
double H_1to3[3][3] = {
{0.9397222389550625, -0.3417130056282905, -244.3182439813799},
{0.3420693933107188, 0.9399119699575031, -137.2934907810936},
{-2.105164197050072e-08, 5.938357135572661e-07, 1.0}
};
cv::Mat matH_1_to_3(3, 3, CV_64F, H_1to3);
double H_2toPan[3][3] = {
{0.9368203321472403, -0.3454438491707963, 662.6735928838605},
{0.3407072775400232, 0.9356103255435544, -6.647965498116199},
{-1.969823553341344e-06, -6.793479233220533e-06, 1.0}
};
cv::Mat matH_2toPan(3, 3, CV_64F, H_2toPan);
cv::Mat img1, img2, img3;
cv::VideoCapture capture("http://answers.opencv.org/upfiles/14298087802018564.jpg");
if(!capture.isOpened()) {
return -1;
}
capture >> img1;
capture = cv::VideoCapture("http://answers.opencv.org/upfiles/14298088061356162.jpg");
if(!capture.isOpened()) {
return -1;
}
capture >> img2;
capture = cv::VideoCapture("http://answers.opencv.org/upfiles/14303473366969024.jpg");
if(!capture.isOpened()) {
return -1;
}
capture >> img3;
if(img1.empty() || img2.empty() || img3.empty()) {
return -1;
}
cv::resize(img1, img1, cv::Size(), 0.5, 0.5);
cv::resize(img2, img2, cv::Size(), 0.5, 0.5);
cv::resize(img3, img3, cv::Size(), 0.5, 0.5);
cv::Mat mask;
cv::Mat panorama = stitch(img3, img1, mask, matH_1_to_3);
panorama = stitch(panorama, img2, mask, matH_2toPan);
cv::imshow("panorama", panorama);
cv::waitKey(0);
return 0;
}
| | 5 | No.5 Revision |
I tried to do the same using a basic video.
There is maybe a better solution but this is how I did to stitch the images (maybe this could help you):
To copy/paste the images, in pseudo-code:
for each new image {
//Get the new image
capture >> img_cur
//Copy the current panorama into panoramaCur
cv::Mat panoramaCur;
panorama.copyTo(panoramaCur);
//panoramaSize: new panorama size
//Warp and copy img_cur into panoramaCur using the homography H
cv::warpPerspective(img_cur, panoramaCur, H_curto1, panoramaSize);
//ROI for the previous panorama
cv::Mat half(panoramaCur, cv::Rect(0, 0, panorama.cols, panorama.rows));
panorama.copyTo(half);
//Get the new panorama result
panoramaCur.copyTo(panorama);
}
Finally, the result in video.
Edit:
First of all, it is the first time I "play" with image stitching so the method I present is not necessarily good or optimal. I think that the problem you encounter is that some pixels in the original image are warped in negative coordinates.
In your case, it seems that the view is shot from an UAV. I think that the easiest solution is to divide the mosaic image in a grid of 3x3. The central part will show always the current image. There will be always some free space for the result of the warping.
Some test I made (tl:dr). For example, with the two images below:
If we warp the image 2, some pixels will not be shown (e.g. the roof):
The stitching will look like this:
In fact, if we print the homography matrix:
double homography[3][3] = {
{0.999953365335864, -0.0001669222180845182, 507.0299576823942},
{5.718816824900338e-05, 0.9999404263126825, -191.9941904903286},
{1.206803293748564e-08, -1.563550523469747e-07, 1},
};
we can see that the translation in y is negative.
My solution would be to put 0 for t_x or t_y if they are negative for the homography matrix and use it to warp the image. After, I paste the first image not in (0,0) but in (offsetX, offsetY):
You can also calculate the new coordinates of the image after the warping using perspectiveTransform:
std::vector<cv::Point2f> corners(4);
corners[0] = cv::Point2f(0, 0);
corners[1] = cv::Point2f(0, img2.rows);
corners[2] = cv::Point2f(img2.cols, 0);
corners[3] = cv::Point2f(img2.cols, img2.rows);
std::vector<cv::Point2f> cornersTransform(4);
cv::perspectiveTransform(corners, cornersTransform, H);
Finally, the result of the stitching I can successfully process:
Edit 2:
In fact, setting the translation part to zero in the homography matrix part is not right. It worked in my previous case because there was almost no rotation, only translation. The correct way is to first calculate the maximum offset in x and y (the maximum negative values) for the part outside of the image using perspectiveTransform.
Then, we can premultiply the homography matrix H with another matrix to get all the pixel coordinates in the positive:
cv::warpPerspective(img2, panorama, H2*H, size_warp);
Edit 3:
The code I used for my image stitching tests, it is not perfect but it do almost what I want (it should be fully functional):
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
cv::Mat stitch(const cv::Mat &img1, const cv::Mat &img2, cv::Mat &mask, const cv::Mat &H) {
//Coordinates of the 4 corners of the image
std::vector<cv::Point2f> corners(4);
corners[0] = cv::Point2f(0, 0);
corners[1] = cv::Point2f(0, img2.rows);
corners[2] = cv::Point2f(img2.cols, 0);
corners[3] = cv::Point2f(img2.cols, img2.rows);
std::vector<cv::Point2f> cornersTransform(4);
cv::perspectiveTransform(corners, cornersTransform, H);
double offsetX = 0.0;
double offsetY = 0.0;
//Get max offset outside of the image
for(size_t i = 0; i < 4; i++) {
std::cout << "cornersTransform[" << i << "]=" << cornersTransform[i] << std::endl;
if(cornersTransform[i].x < offsetX) {
offsetX = cornersTransform[i].x;
}
if(cornersTransform[i].y < offsetY) {
offsetY = cornersTransform[i].y;
}
}
offsetX = -offsetX;
offsetY = -offsetY;
std::cout << "offsetX=" << offsetX << " ; offsetY=" << offsetY << std::endl;
//Get max width and height for the new size of the panorama
double maxX = std::max((double) img1.cols+offsetX, (double) std::max(cornersTransform[2].x, cornersTransform[3].x)+offsetX);
double maxY = std::max((double) img1.rows+offsetY, (double) std::max(cornersTransform[1].y, cornersTransform[3].y)+offsetY);
std::cout << "maxX=" << maxX << " ; maxY=" << maxY << std::endl;
cv::Size size_warp(maxX, maxY);
cv::Mat panorama(size_warp, CV_8UC3);
//Create the transformation matrix to be able to have all the pixels
cv::Mat H2 = cv::Mat::eye(3, 3, CV_64F);
H2.at<double>(0,2) = offsetX;
H2.at<double>(1,2) = offsetY;
cv::warpPerspective(img2, panorama, H2*H, size_warp);
//ROI for img1
cv::Rect img1_rect(offsetX, offsetY, img1.cols, img1.rows);
cv::Mat half;
//First iteration
if(mask.empty()) {
//Copy img1 in the panorama using the ROI
cv::Mat half = cv::Mat(panorama, img1_rect);
img1.copyTo(half);
//Create the new mask matrix for the panorama
mask = cv::Mat::ones(img2.size(), CV_8U)*255;
cv::warpPerspective(mask, mask, H2*H, size_warp);
cv::rectangle(mask, img1_rect, cv::Scalar(255), -1);
} else {
//Create an image with the final size to paste img1
cv::Mat maskTmp = cv::Mat::zeros(size_warp, img1.type());
half = cv::Mat(maskTmp, img1_rect);
img1.copyTo(half);
//Copy only pixel with intensity != 0 in panorama
img1 into panorama using a mask
cv::Mat maskTmp2 = cv::Mat::zeros(size_warp, CV_8U);
half = cv::Mat(maskTmp2, img1_rect);
mask.copyTo(half);
maskTmp.copyTo(panorama, maskTmp);
maskTmp2);
//Create a mask for the warped part
maskTmp = cv::Mat::ones(img2.size(), CV_8U)*255;
cv::warpPerspective(maskTmp, maskTmp, H2*H, size_warp);
cv::Mat maskTmp2 = cv::Mat::zeros(size_warp, CV_8U);
half = cv::Mat(maskTmp2, img1_rect);
//Copy the old mask in maskTmp2
mask.copyTo(half);
//Merge the old mask with the new one
maskTmp += maskTmp2;
maskTmp.copyTo(mask);
}
return panorama;
}
int main(int argc, char **argv) {
double H_1to3[3][3] = {
{0.9397222389550625, -0.3417130056282905, -244.3182439813799},
{0.3420693933107188, 0.9399119699575031, -137.2934907810936},
{-2.105164197050072e-08, 5.938357135572661e-07, 1.0}
};
cv::Mat matH_1_to_3(3, 3, CV_64F, H_1to3);
double H_2toPan[3][3] = {
{0.9368203321472403, -0.3454438491707963, 662.6735928838605},
{0.3407072775400232, 0.9356103255435544, -6.647965498116199},
{-1.969823553341344e-06, -6.793479233220533e-06, 1.0}
};
cv::Mat matH_2toPan(3, 3, CV_64F, H_2toPan);
cv::Mat img1, img2, img3;
cv::VideoCapture capture("http://answers.opencv.org/upfiles/14298087802018564.jpg");
if(!capture.isOpened()) {
return -1;
}
capture >> img1;
capture = cv::VideoCapture("http://answers.opencv.org/upfiles/14298088061356162.jpg");
if(!capture.isOpened()) {
return -1;
}
capture >> img2;
capture = cv::VideoCapture("http://answers.opencv.org/upfiles/14303473366969024.jpg");
if(!capture.isOpened()) {
return -1;
}
capture >> img3;
if(img1.empty() || img2.empty() || img3.empty()) {
return -1;
}
cv::resize(img1, img1, cv::Size(), 0.5, 0.5);
cv::resize(img2, img2, cv::Size(), 0.5, 0.5);
cv::resize(img3, img3, cv::Size(), 0.5, 0.5);
cv::Mat mask;
cv::Mat panorama = stitch(img3, img1, mask, matH_1_to_3);
panorama = stitch(panorama, img2, mask, matH_2toPan);
cv::imshow("panorama", panorama);
cv::waitKey(0);
return 0;
}