This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Hi,
ArUco provides the transformation from the marker's coordinate system to the camera's system.
As Eduardo said, you can transform the finger point to the marker's system just by applying the inverse transformation.
However, you say that your camera's coordinate system is left-handed, and the transformation provided by ArUco assumes a right-handed camera system (same as OpenCV):
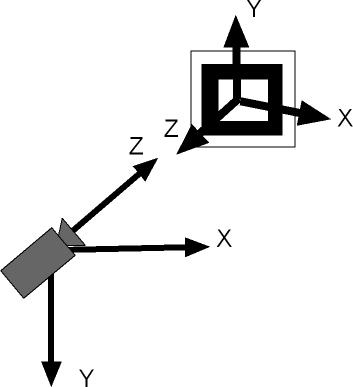
If your finger point is refered to a left-handed system, you have to transform the point to the ArUco right-handed camera system before applying the inverse marker transformation.
Considering your picture, you can accomplish this by simply negating the Y coordinate of the finger point.
| | 2 | No.2 Revision |
Hi,
ArUco provides the transformation from the marker's coordinate system to the camera's system.
As Eduardo said, you can transform the finger point to the marker's system just by applying the inverse transformation.
However, you say that your camera's coordinate system is left-handed, and the transformation provided by ArUco assumes a right-handed camera system (same as OpenCV):
If your finger point is refered to a left-handed system, you have to transform the point to the ArUco right-handed camera system before applying the inverse marker transformation.
Considering your picture, you can accomplish this by simply negating the Y coordinate of the finger point.