This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
it's a bit of a shame, that you can't access the LineIterator from python, as it saves you from finding the intersection point manually :
Mat ocv = imread("k4eIlCQ.png");
Mat gray; cvtColor(ocv,gray,COLOR_BGR2GRAY);
threshold(gray,gray,100,255,0);
Moments M = moments(gray);
Point cen( int(M.m10/M.m00), int(M.m01/M.m00) );
for (int i=0; i<360; i+=20)
{
double s = sin(i*CV_PI/180);
double c = cos(i*CV_PI/180);
Point p2(cen.x+s*150, cen.y+c*150);
LineIterator it(ocv, cen, p2, 8);
Rect bounds(0, 0, ocv.cols, ocv.rows);
while(bounds.contains(it.pos()))
{
Vec3b & pixel = ocv.at<Vec3b>(it.pos());
// if you stare really hard, you'll see the cheat ;)
if (pixel[0] > 50) // non dark(it's not really black in the image!)
pixel[1] = pixel[2] = 0; // set g and b to 0, leaves blue line
else
break;
it++;
}
}
imshow("lines", ocv);
| | 2 | No.2 Revision |
it's a bit of a shame, that you can't access the LineIterator from python, as it saves you from finding the intersection point manually :
Mat ocv = imread("k4eIlCQ.png");
Mat gray; cvtColor(ocv,gray,COLOR_BGR2GRAY);
threshold(gray,gray,100,255,0);
Moments M = moments(gray);
Point cen( int(M.m10/M.m00), int(M.m01/M.m00) );
for (int i=0; i<360; i+=20)
{
double s = sin(i*CV_PI/180);
double c = cos(i*CV_PI/180);
Point p2(cen.x+s*150, cen.y+c*150);
cen.y+c*150); // any radius will do, we just want the direction
LineIterator it(ocv, cen, p2, 8);
Rect bounds(0, 0, ocv.cols, ocv.rows);
while(bounds.contains(it.pos()))
{
Vec3b & pixel = ocv.at<Vec3b>(it.pos());
// if you stare really hard, you'll see the cheat ;)
if (pixel[0] > 50) // non dark(it's not really black in the image!)
pixel[1] = pixel[2] = 0; // set g and b to 0, leaves blue line
else
break;
it++;
}
}
imshow("lines", ocv);
| | 3 | No.3 Revision |
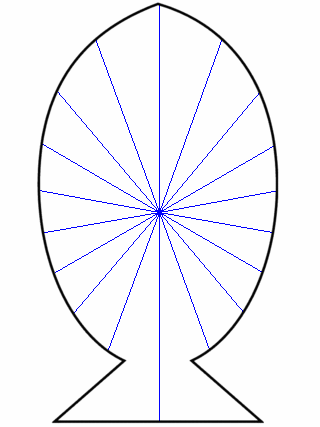
it's a bit of a shame, that you can't access the LineIterator from python, as it saves you from finding the intersection point manually manually, you'd just walk on with your line, until you reach a border pixel (or the image bounds) :
Mat ocv = imread("k4eIlCQ.png");
Mat gray; cvtColor(ocv,gray,COLOR_BGR2GRAY);
threshold(gray,gray,100,255,0);
Moments M = moments(gray);
Point cen( int(M.m10/M.m00), int(M.m01/M.m00) );
for (int i=0; i<360; i+=20)
{
double s = sin(i*CV_PI/180);
double c = cos(i*CV_PI/180);
Point p2(cen.x+s*150, cen.y+c*150); // any radius will do, we just want the direction
LineIterator it(ocv, cen, p2, 8);
Rect bounds(0, 0, ocv.cols, ocv.rows);
while(bounds.contains(it.pos()))
{
Vec3b & pixel = ocv.at<Vec3b>(it.pos());
// if you stare really hard, you'll see the cheat ;)
if (pixel[0] > 50) // non dark(it's not really black in the image!)
pixel[1] = pixel[2] = 0; // set g and b to 0, leaves blue line
else
break;
it++;
}
}
imshow("lines", ocv);