This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I implemented a stereo rectification algorithm based on "A compact algorithm for rectification of stereo pairs" by Fusiello et al. It works quite well for my use case.
If this still doesn't work, check your camera calibration matrix!
| | 2 | No.2 Revision |
I implemented a stereo rectification algorithm based on "A compact algorithm for rectification of stereo pairs" by Fusiello et al. It works quite well for my use case.
If this still doesn't work, But I found out what I did wrong: check your the camera calibration matrix!matrix!
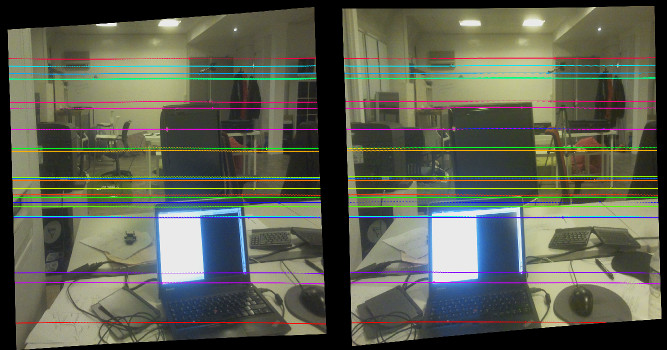
I checked the cv::stereoRectify again, with a generic camera calibration matrix [2600, 0, 1280 0, 2600, 960 0, 0, 1] and the distortion parameters found by calibration. Now I get this result: