This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
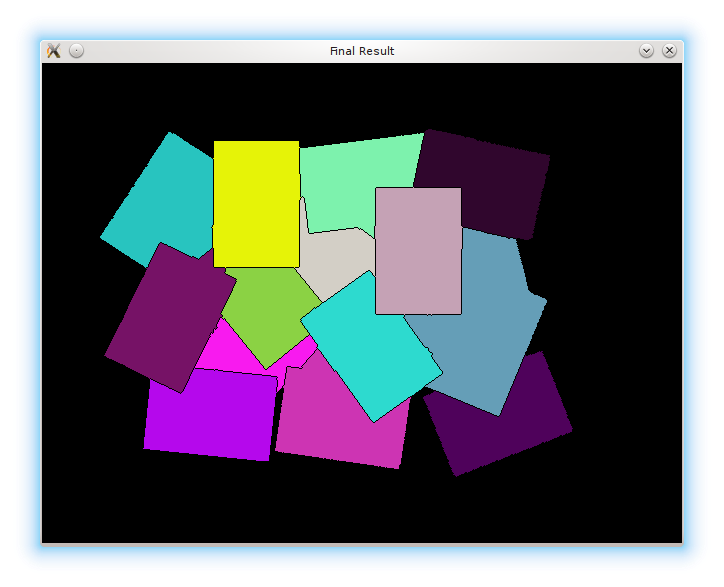
Well gfx, I had some free time and I worked a bit on your problem. I considered that you wanted to detect all the individual cards on the table both full/partially occluded or not. Here are my results:
#include <opencv2/opencv.hpp>
#include <iostream>
int main()
{
// Load your image
cv::Mat src = cv::imread("cards1.png");
// Check if everything was fine
if (!src.data)
return -1;
// Show source image
cv::imshow("Source Image", src);
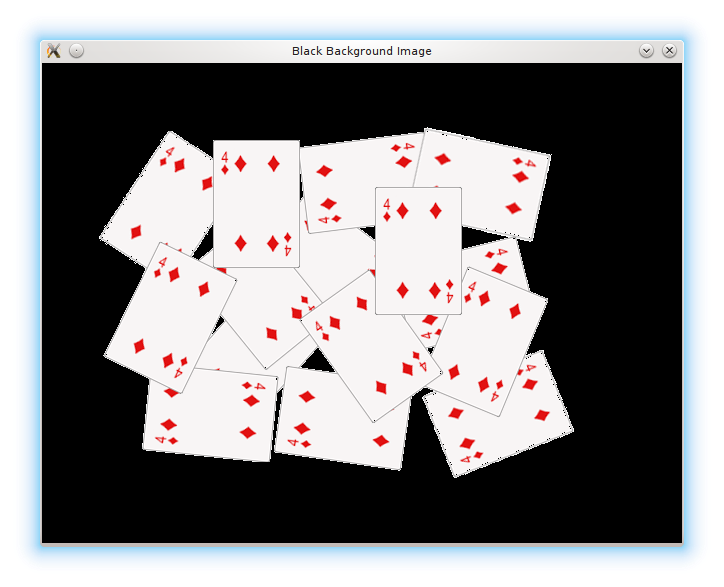
// Change the background from white to black, since that will help later to extract
// better results during the use of Distance Transform
for( int x = 0; x < src.rows; x++ ) {
for( int y = 0; y < src.cols; y++ ) {
if ( src.at<cv::Vec3b>(x, y) == cv::Vec3b(255,255,255) ) {
src.at<cv::Vec3b>(x, y)[0] = 0;
src.at<cv::Vec3b>(x, y)[1] = 0;
src.at<cv::Vec3b>(x, y)[2] = 0;
}
}
}
// Show output image
cv::imshow("Black Background Image", src);
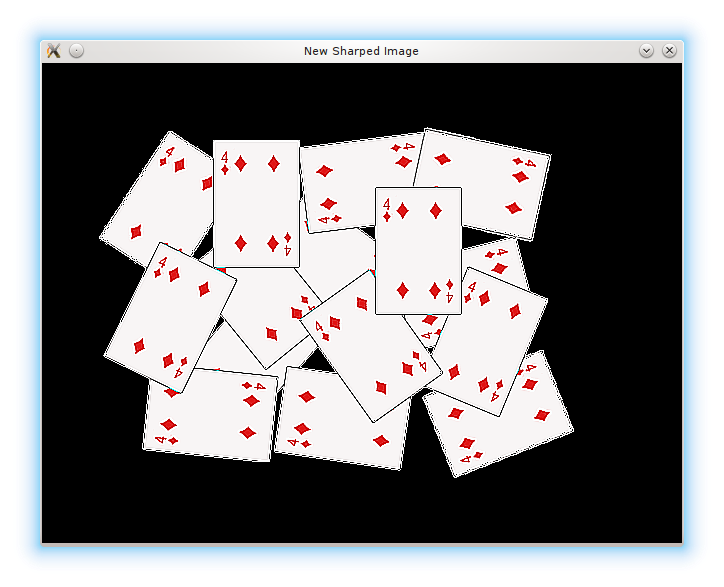
// Create a kernel that we will use for accuting/sharpening our image
cv::Mat kernel = (cv::Mat_<float>(3,3) <<
1, 1, 1,
1, -8, 1,
1, 1, 1); // an approximation of second derivative, quite strong
// do the laplacian filtering as it is
// well, we need to convert everything in something more deeper then CV_8U
// because the kernel has some negative values,
// and we can expect in general to have a Laplacian image with negative values
// BUT a 8bits unsigned int (the one we are working with) can contain values from 0 to 255
// so the possible negative number will be truncated
cv::Mat imgLaplacian;
cv::Mat sharp = src;
cv::filter2D(sharp, imgLaplacian, CV_32F, kernel);
src.convertTo(sharp, CV_32F);
cv::Mat imgResult = sharp - imgLaplacian;
// convert back to 8bits gray scale
imgResult.convertTo(imgResult, CV_8UC3);
imgLaplacian.convertTo(imgLaplacian, CV_8UC3);
// imshow( "laplacian", imgLaplacian );
imshow( "New Sharped Image", imgResult );
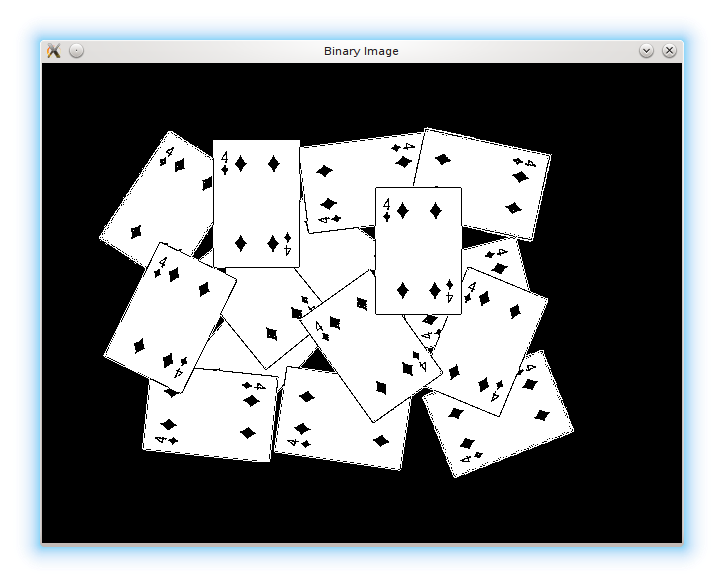
// Create binary image from source image
cv::Mat bw;
src = imgResult;
cv::cvtColor(src, bw, CV_BGR2GRAY);
cv::threshold(bw, bw, 40, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
cv::imshow("Binary Image", bw);
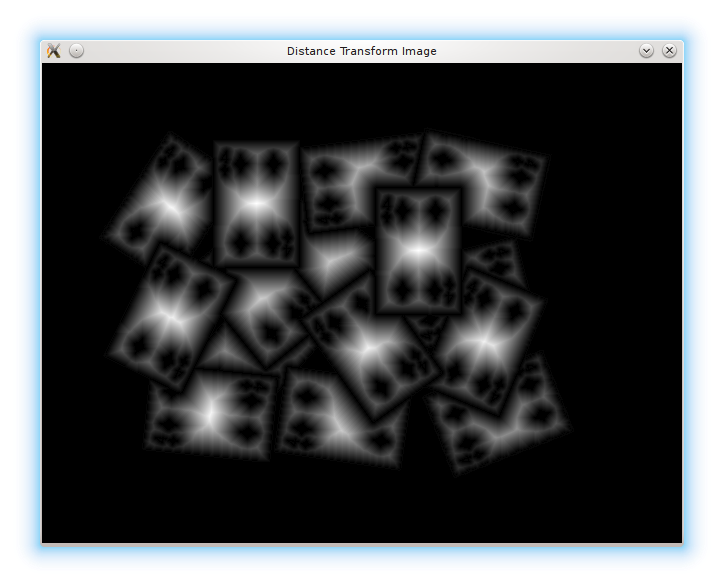
// Perform the distance transform algorithm
cv::Mat dist;
cv::distanceTransform(bw, dist, CV_DIST_L2, 3);
// Normalize the distance image for range = {0.0, 1.0}
// so we can visualize and threshold it
cv::normalize(dist, dist, 0, 1., cv::NORM_MINMAX);
cv::imshow("Distance Transform Image", dist);
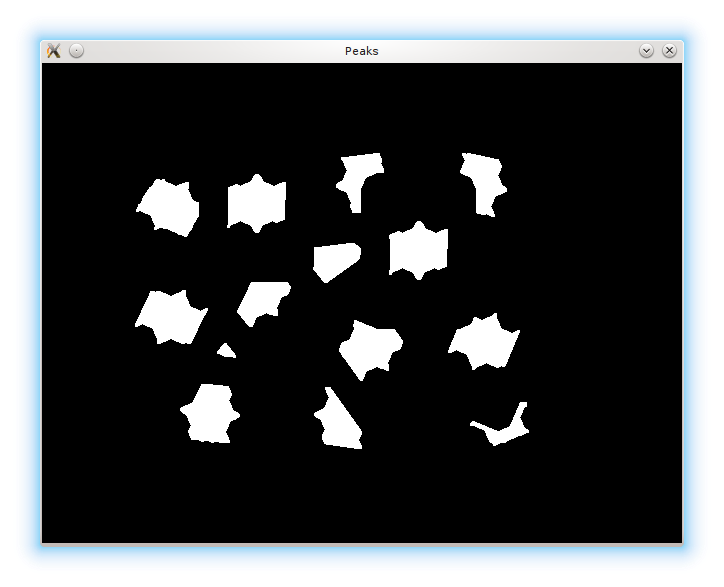
// Threshold to obtain the peaks
// This will be the markers for the foreground objects
cv::threshold(dist, dist, .4, 1., CV_THRESH_BINARY);
// Dilate a bit
cv::Mat kernel1 = cv::Mat::ones(3, 3, CV_8UC1);
cv::dilate(dist, dist, kernel1);
cv::imshow("Peaks", dist);
// Create the CV_8U version of the distance image
// It is needed for cv::findContours()
cv::Mat dist_8u;
dist.convertTo(dist_8u, CV_8U);
// Find total markers
std::vector<std::vector<cv::Point> > contours;
cv::findContours(dist_8u, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
int ncomp = contours.size();
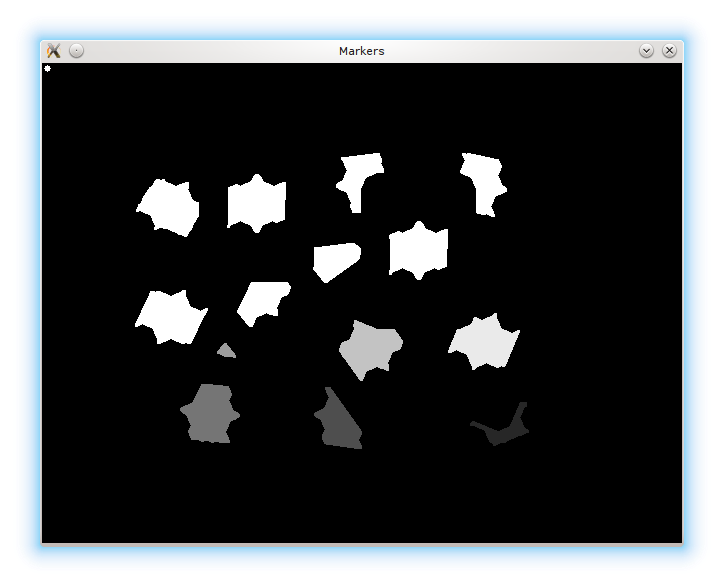
// Create the marker image for the watershed algorithm
cv::Mat markers = cv::Mat::zeros(dist.size(), CV_32SC1);
// Draw the foreground markers
for (int i = 0; i < ncomp; i++)
cv::drawContours(markers, contours, i, cv::Scalar::all(i+1), -1);
// Draw the background marker
cv::circle(markers, cv::Point(5,5), 3, CV_RGB(255,255,255), -1);
cv::imshow("Markers", markers*10000);
cv::Mat mark = cv::Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
cv::bitwise_not(mark, mark);
// cv::imshow("Markers_v2", mark);
// Generate random colors
std::vector<cv::Vec3b> colors;
for (int i = 0; i < ncomp; i++)
{
int b = cv::theRNG().uniform(0, 255);
int g = cv::theRNG().uniform(0, 255);
int r = cv::theRNG().uniform(0, 255);
colors.push_back(cv::Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// Create the result image
cv::Mat dst = cv::Mat::zeros(markers.size(), CV_8UC3);
// Fill labeled objects with random colors
for (int i = 0; i < markers.rows; i++)
{
for (int j = 0; j < markers.cols; j++)
{
int index = markers.at<int>(i,j);
if (index > 0 && index <= ncomp)
dst.at<cv::Vec3b>(i,j) = colors[index-1];
else
dst.at<cv::Vec3b>(i,j) = cv::Vec3b(0,0,0);
}
}
cv::imshow("Final Result", dst);
cv::waitKey(0);
return 0;
}
the core algorithm is taken from here with some customization in order to improve the output dedicated to this use case. I do not know if this solution, fits your requirements but at least you have something. If you think that you can use this solution, please spend some more time on it, since by customizing some attributes on the different functions you might improve/optimize the final output.
