This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
There is one simple way to detect if the camera is moving. People here have already pointed out that a solution to simply match the points in the frame would not work as even if a camera is steady, there can be a motion in that frame.
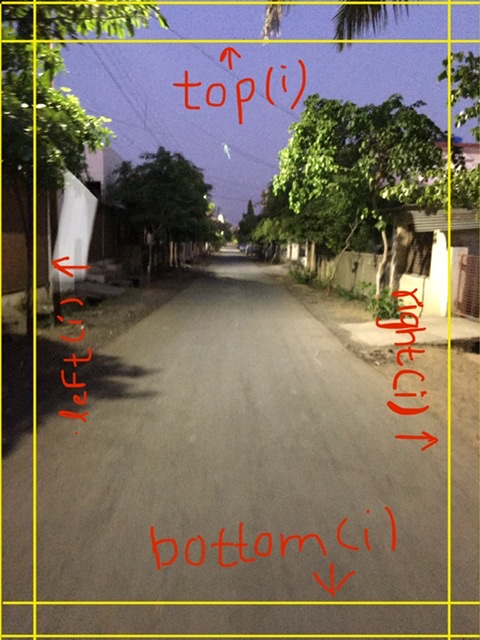
To tackle all of such possibilities, think of drawing boxes along the edges of the frame. These boxes would have width of ~5% width of the frame and run along the all vertical and horizontal edges of the frame.
Let’s name those 4 boxes: top(i), bottom(i) left(i) and right(i)
And we have two frame f1 and f2 in consideration.
While matching the two frames in consideration, we match the points only within the boxes.
i.e., match top(1) with top(2), bottom(1) with bottom(2) and so on. If all four boxes are not matching, then the camera is moving
| | 2 | No.2 Revision |
There is one simple way to detect if the camera is moving. People here have already pointed out that a solution to simply match the points in the frame would not work as even if a camera is steady, there can be a motion in that frame.
To tackle all of such possibilities, think of drawing boxes along the edges of the frame. These boxes would have width of ~5% width of the frame and run along the all vertical and horizontal edges of the frame.
Let’s name those 4 boxes: top(i), bottom(i) left(i) and right(i)
And we have two frame f1 and f2 in consideration.
While matching the two frames in consideration, we match the points only within the boxes.
i.e., match top(1) with top(2), bottom(1) with bottom(2) and so on. If all four boxes are not matching, then the camera is moving
| | 3 | No.3 Revision |
There is one simple way to detect if the camera is moving. People here have already pointed out that a solution to simply match the points in the frame would not work as even if a camera is steady, there can be a motion in that frame.
To tackle all of such possibilities, think of drawing boxes along the edges of the frame. These boxes would have width of ~5% width of the frame and run along the all vertical and horizontal edges of the frame.
Let’s name those 4 boxes: top(i), bottom(i) left(i) and right(i)
And we have two frame f1 and f2 in consideration.
While matching the two frames in consideration, we match the points only within the boxes.
i.e., match top(1) with top(2), bottom(1) with bottom(2) and so on. If all four boxes are not matching, then the camera is moving