This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
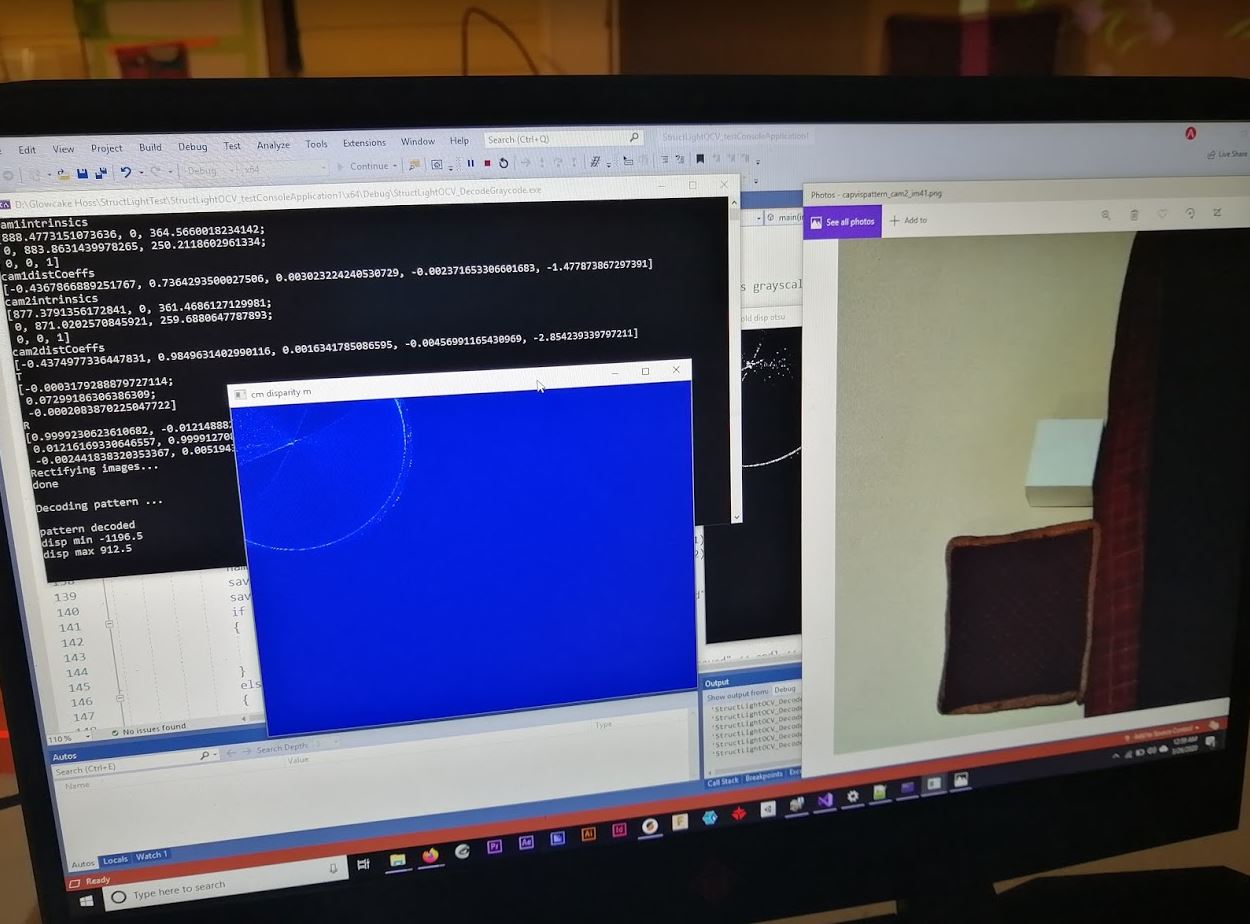
So after trying powers of two resolutions, and getting the same results when passing it through the graycode decode function in this module, my main conclusion is just that when working with non-powers of 2 sized resolutions, the resulting graycode must have some weird offset. And that it wouldn't really matter as long as the decoding process is consistently offset as well.
So the possible answer to my question above is, yes, the graycode is supposed to be that way.
(but i still don't get the small doubled up lines that appear in the later images in the set of the graycode)
(andy my real question now is how come my decode still doesn't give a depth map that looks like anything the camera is facing) :(
| | 2 | No.2 Revision |
So after trying powers of two resolutions, and getting the same results when passing it through the graycode decode function in this module, my main conclusion is just that when working with non-powers of 2 sized resolutions, the resulting graycode must have some weird offset. And that it wouldn't really matter as long as the decoding process is consistently offset as well.
So the possible answer to my question above is, yes, the graycode is supposed to be that way.
(but i still don't get the small doubled up lines that appear in the later images in the set of the graycode)
(andy my real question now is how come my decode still doesn't give a depth map that looks like anything the camera is facing) :(
| | 3 | No.3 Revision |
So after trying powers of two resolutions, and getting the same results when passing it through the graycode decode function in this module, my main conclusion is just that when working with non-powers of 2 sized resolutions, the resulting graycode must have some weird offset. And that it wouldn't really matter as long as the decoding process is consistently offset as well.
So the possible answer to my question above is, yes, the graycode is supposed to be that way.
(but i still don't get the small doubled up lines that appear in the later images in the set of the graycode)
(andy my real question now is how come my decode still doesn't give a depth map that looks like anything the camera is facing) :(:(