This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I solved problem:
!/usr/bin/python3
#Raspberry pi 3B/+, OpenCV 4.1.0
#Date: 2nd June, 2019
import numpy as np
import cv2
img = cv2.imread('blob.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blurred = cv2.medianBlur(gray, 9)
_filter = cv2.bilateralFilter(blurred, 5, 75, 75)
adap_thresh = cv2.adaptiveThreshold(_filter,
255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
21, 0)
element = cv2.getStructuringElement(cv2.MORPH_RECT, (3,3))
dilated = cv2.dilate(adap_thresh, element, iterations=1)
# blob detection
params = cv2.SimpleBlobDetector_Params()
params.filterByColor = False
params.minThreshold = 65
params.maxThreshold = 93
params.blobColor = 0
params.minArea = 10
params.maxArea = 5000
params.filterByCircularity = False
params.filterByConvexity = False
params.minCircularity =.4
params.maxCircularity = 1
det = cv2.SimpleBlobDetector_create(params)
keypts = det.detect(dilated)
im_with_keypoints = cv2.drawKeypoints(dilated,
keypts,
np.array([]),
(0, 0, 255),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
res = cv2.drawKeypoints(img,
keypts,
np.array([]),
(0, 0, 255 ),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
i = 0
for kp in keypts:
print("(%f,%f)"%(kp.pt[0],kp.pt[1]))
i+=1
cv2.rectangle(res,(int(kp.pt[0]),int(kp.pt[1])),(int(kp.pt[0])+1,int(kp.pt[1])+1),(0,255,0),2)
#cv2.imshow("Keypoints", im_with_keypoints)
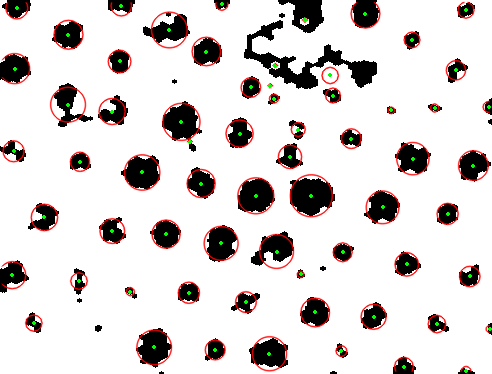
cv2.imshow("RES", res)
cv2.waitKey(0)
Output:
| | 2 | No.2 Revision |
I solved problem:
I solved problem:
!/usr/bin/python3
#Raspberry pi 3B/+, OpenCV 4.1.0
#Date: 2nd June, 2019
import numpy as np
import cv2
img = cv2.imread('blob.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blurred = cv2.medianBlur(gray, 9)
_filter = cv2.bilateralFilter(blurred, 5, 75, 75)
adap_thresh = cv2.adaptiveThreshold(_filter,
255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
21, 0)
element = cv2.getStructuringElement(cv2.MORPH_RECT, (3,3))
dilated = cv2.dilate(adap_thresh, element, iterations=1)
# blob detection
params = cv2.SimpleBlobDetector_Params()
params.filterByColor = False
params.minThreshold = 65
params.maxThreshold = 93
params.blobColor = 0
params.minArea = 10
params.maxArea = 5000
params.filterByCircularity = False
params.filterByConvexity = False
params.minCircularity =.4
params.maxCircularity = 1
det = cv2.SimpleBlobDetector_create(params)
keypts = det.detect(dilated)
im_with_keypoints = cv2.drawKeypoints(dilated,
keypts,
np.array([]),
(0, 0, 255),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
res = cv2.drawKeypoints(img,
keypts,
np.array([]),
(0, 0, 255 ),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
i = 0
for kp in keypts:
print("(%f,%f)"%(kp.pt[0],kp.pt[1]))
i+=1
cv2.rectangle(res,(int(kp.pt[0]),int(kp.pt[1])),(int(kp.pt[0])+1,int(kp.pt[1])+1),(0,255,0),2)
#cv2.imshow("Keypoints", im_with_keypoints)
cv2.imshow("RES", res)
cv2.waitKey(0)
Output:
| | 3 | No.3 Revision |
I solved problem:
!/usr/bin/python3
#!/usr/bin/python3
#Raspberry pi 3B/+, OpenCV 4.1.0
#Date: 2nd June, 2019
import numpy as np
import cv2
img = cv2.imread('blob.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blurred = cv2.medianBlur(gray, 9)
_filter = cv2.bilateralFilter(blurred, 5, 75, 75)
adap_thresh = cv2.adaptiveThreshold(_filter,
255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
21, 0)
element = cv2.getStructuringElement(cv2.MORPH_RECT, (3,3))
dilated = cv2.dilate(adap_thresh, element, iterations=1)
# blob detection
params = cv2.SimpleBlobDetector_Params()
params.filterByColor = False
params.minThreshold = 65
params.maxThreshold = 93
params.blobColor = 0
params.minArea = 10
params.maxArea = 5000
params.filterByCircularity = False
params.filterByConvexity = False
params.minCircularity =.4
params.maxCircularity = 1
det = cv2.SimpleBlobDetector_create(params)
keypts = det.detect(dilated)
im_with_keypoints = cv2.drawKeypoints(dilated,
keypts,
np.array([]),
(0, 0, 255),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
res = cv2.drawKeypoints(img,
keypts,
np.array([]),
(0, 0, 255 ),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
i = 0
for kp in keypts:
print("(%f,%f)"%(kp.pt[0],kp.pt[1]))
i+=1
cv2.rectangle(res,(int(kp.pt[0]),int(kp.pt[1])),(int(kp.pt[0])+1,int(kp.pt[1])+1),(0,255,0),2)
#cv2.imshow("Keypoints", im_with_keypoints)
cv2.imshow("RES", res)
cv2.waitKey(0)
Output:
