This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Hello, thank you for your answer.
To verify my stereo calibration results, I put left and right frames side by side and draw horizontal lines, to see if they would pass exactly at the same points. Is that enough? Also, even after having taken 40 calibration pictures, I still get some little errors (see below image), and the horizontal lines don't pass exactly at the same point. What can I do to get a better result ? Does little errors like this influence the result in a significant manner for the disparity map ?
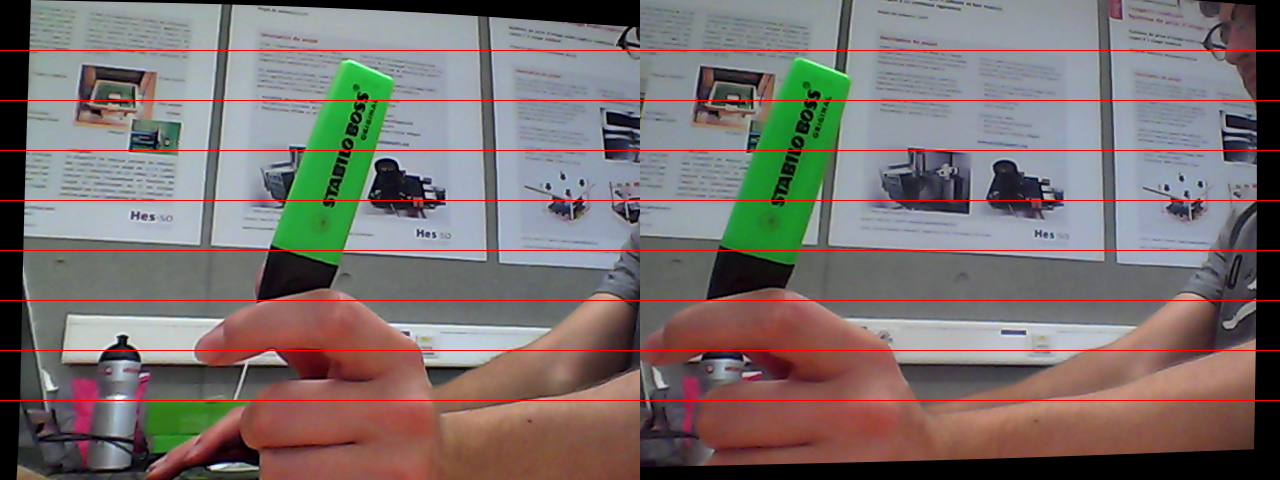
Also, as you can see on the picture, the quality of the image isn't very good. You mentionned that Stereo disparity algorithms are affected by noise, does it mean that if I have better image quality, I will get much better disparity maps ?
Thank you for the explanations on the parameters of Stereo BM & SGB. Could you maybe just explain a bit more how the textureThreshold and uniquenessRation works ? How is texture caracterized in textureThreshold and what does uniquenessRation do exactly ?
Finally, have you ever worked with the WLS filter ? I haven't been able to find explanations on how it really works anywhere... Any help would be helpful.
Thank you.