This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
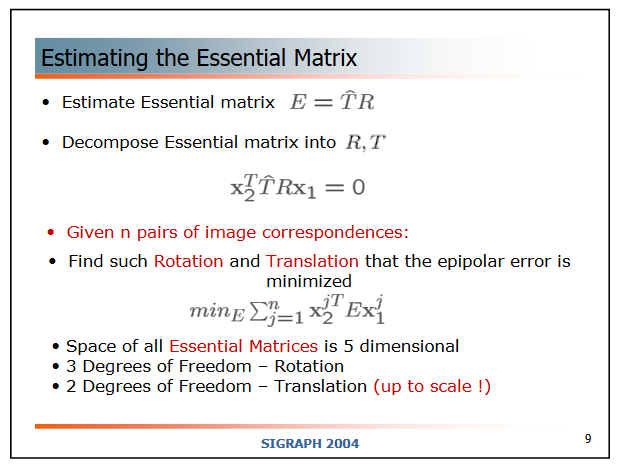
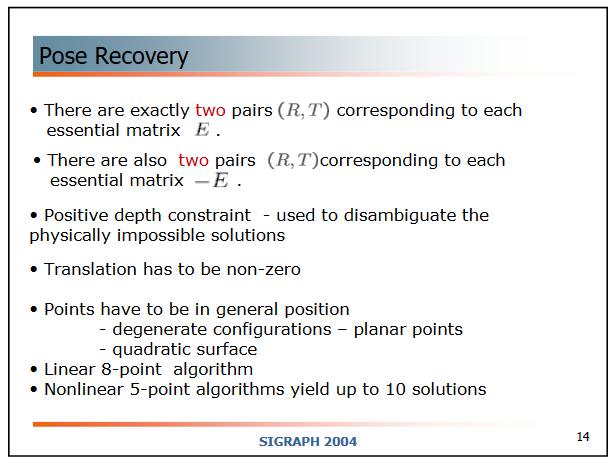
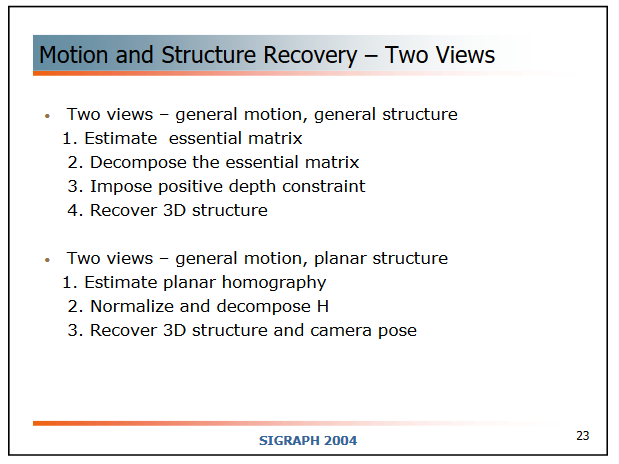
Looks like your points are planar?
If so, it is a degenerate configuration to be able to estimate correctly the essential matrix. Have a look at this course:
Or at these two classical books:
I have reported here the relevant slides from the mentioned course:
Since you are using a fisheye lens, I would undistort the images before computing the fundamental matrix.
Here some experiments with the fundamental / essential matrix and pose recovering:
Code:
#include <iostream>
#include <opencv2/opencv.hpp>
void cameraDisplacement(const cv::Mat& rvec1, const cv::Mat& tvec1, const cv::Mat& rvec2, const cv::Mat& tvec2,
cv::Mat& rvec1to2, cv::Mat& tvec1to2) {
cv::Mat R1, R2, R1to2;
cv::Rodrigues(rvec1, R1);
cv::Rodrigues(rvec2, R2);
R1to2 = R2.t() * R1;
cv::Rodrigues(R1to2, rvec1to2);
tvec1to2 = R2 * (-R1.t()*tvec1) + tvec2;
}
void compute_R_t_fromEssentialMatrix(const cv::Mat& E, std::vector<cv::Mat>& rvecs, std::vector<cv::Mat>& ts, std::vector<cv::Mat>& ts2) {
//https://github.com/libmv/libmv/blob/8040c0f6fa8e03547fd4fbfdfaf6d8ffd5d1988b/src/libmv/multiview/fundamental.cc#L302-L338
cv::Mat w, u, vt;
cv::SVDecomp(E, w, u, vt, cv::SVD::FULL_UV);
// Last column of U is undetermined since d = (a a 0).
if (cv::determinant(u) < 0) {
u.col(2) *= -1;
}
// Last row of Vt is undetermined since d = (a a 0).
if (cv::determinant(vt) < 0) {
vt.row(2) *= -1;
}
//std::cout << "vt:\n" << vt << std::endl;
cv::Mat W = (cv::Mat_<double>(3, 3) << 0, -1, 0,
1, 0, 0,
0, 0, 1);
cv::Mat U_W_Vt = u * W * vt;
cv::Mat U_Wt_Vt = u * W.t() * vt;
rvecs.resize(4);
cv::Mat R = U_W_Vt, rvec;
cv::Rodrigues(R, rvec);
rvecs[0] = rvec;
rvecs[1] = rvec;
cv::Mat R2 = U_Wt_Vt, rvec2;
cv::Rodrigues(R2, rvec2);
rvecs[2] = rvec2;
rvecs[3] = rvec2;
ts.resize(4);
ts[0] = u.col(2);
ts[1] = -u.col(2);
ts[2] = u.col(2);
ts[3] = -u.col(2);
//https://en.wikipedia.org/wiki/Essential_matrix#Determining_R_and_t_from_E
ts2.resize(4);
cv::Mat Z = (cv::Mat_<double>(3, 3) << 0, 1, 0,
-1, 0, 0,
0, 0, 0);
cv::Mat tskew = u*Z*u.t();
ts2[0] = (cv::Mat_<double>(3, 1) << tskew.at<double>(2, 1),
tskew.at<double>(0, 2),
tskew.at<double>(1, 0));
ts2[1] = -ts[0];
ts2[2] = ts[0];
ts2[3] = -ts[0];
}
int main() {
//object points
std::vector<cv::Point3d> objectPoints;
//4 planar points
objectPoints.push_back(cv::Point3d(-0.5, -0.5, 0.0));
objectPoints.push_back(cv::Point3d(0.5, -0.5, 0.0));
objectPoints.push_back(cv::Point3d(0.5, 0.5, 0.0));
objectPoints.push_back(cv::Point3d(-0.5, 0.5, 0.0));
//4 more points
objectPoints.push_back(cv::Point3d(-0.75, 0.22, 0.84));
objectPoints.push_back(cv::Point3d(0.11, -0.67, 1.53));
objectPoints.push_back(cv::Point3d(0.39, 0.08, 0.38));
objectPoints.push_back(cv::Point3d(-0.45, -0.18, 0.23));
//initial camera pose
cv::Mat rvec1 = (cv::Mat_<double>(3, 1) << 5.0*CV_PI / 180.0, -3.0*CV_PI / 180.0, 8.0*CV_PI / 180.0);
cv::Mat tvec1 = (cv::Mat_<double>(3, 1) << 0.1, 0.2, 2.0);
//project points
cv::Mat cameraMatrix = (cv::Mat_<double>(3, 3) << 600.0, 0.0, 320.0,
0.0, 600.0, 240.0,
0.0, 0.0, 1.0);
std::vector<cv::Point2d> imagePoints1;
cv::projectPoints(objectPoints, rvec1, tvec1, cameraMatrix, cv::noArray(), imagePoints1);
for (size_t i = 0; i < imagePoints1.size(); i++) {
std::cout << "imagePoints1[" << i << "]: " << imagePoints1[i] << std::endl;
}
//new camera pose
cv::Mat rvec2 = (cv::Mat_<double>(3, 1) << -3.0*CV_PI / 180.0, -5.0*CV_PI / 180.0, -3.0*CV_PI / 180.0);
cv::Mat tvec2 = (cv::Mat_<double>(3, 1) << 0.15, 0.12, 1.85);
//camera displacement
cv::Mat rvec1to2, tvec1to2;
cameraDisplacement(rvec1, tvec1, rvec2, tvec2, rvec1to2, tvec1to2);
std::cout << "rvec1to2: " << rvec1to2.t() << std::endl;
std::cout << "tvec1to2: " << tvec1to2.t() << std::endl;
//project points using new camera pose
std::vector<cv::Point2d> imagePoints2;
cv::projectPoints(objectPoints, rvec2, tvec2, cameraMatrix, cv::noArray(), imagePoints2);
for (size_t i = 0; i < imagePoints2.size(); i++) {
std::cout << "imagePoints2[" << i << "]: " << imagePoints2[i] << std::endl;
}
//find fundamental matrix
cv::Mat F = cv::findFundamentalMat(imagePoints1, imagePoints2, cv::noArray(), cv::FM_7POINT);
std::cout << "\nF:\n" << F << std::endl;
//calculate error
double meanError = 0.0;
for (size_t i = 0; i < objectPoints.size(); i++) {
cv::Point2d x1 = imagePoints1[i], x2 = imagePoints2[i];
double F0 = F.at<double>(0, 0) * x1.x + F.at<double>(0, 1) * x1.y + F.at<double>(0, 2);
double F1 = F.at<double>(1, 0) * x1.x + F.at<double>(1, 1) * x1.y + F.at<double>(1, 2);
double F2 = F.at<double>(2, 0) * x1.x + F.at<double>(2, 1) * x1.y + F.at<double>(2, 2);
meanError += x2.x * F0 + x2.y * F1 + F2;
}
std::cout << "meanError: " << meanError / objectPoints.size() << std::endl;
//essential matrix
cv::Mat E = cameraMatrix.t() * F * cameraMatrix;
std::cout << "\nE:\n" << E << std::endl;
cv::Mat E2 = cv::findEssentialMat(imagePoints1, imagePoints2, cameraMatrix, cv::LMEDS);
std::cout << "E2:\n" << E2 << std::endl;
double scale = E.at<double>(2, 2) / E2.at<double>(2, 2);
std::cout << "E2:\n" << scale*E2 << std::endl;
//camera displacement from 2 to 1
cv::Mat rvec2to1, tvec2to1;
cameraDisplacement(rvec2, tvec2, rvec1, tvec1, rvec2to1, tvec2to1);
//recover pose
cv::Mat R, t, rvec;
cv::recoverPose(E, imagePoints1, imagePoints2, cameraMatrix, R, t);
cv::Rodrigues(R, rvec);
std::cout << "\nrvec2to1: " << rvec2to1.t() << std::endl;
std::cout << "rvec (from recoverPose): " << rvec.t() << std::endl;
std::cout << "\ntvec2to1: " << tvec2to1.t() << std::endl;
std::cout << "t (from recoverPose): " << t.t() << std::endl;
double scalePose = tvec2to1.at<double>(2, 0) / t.at<double>(2, 0);
std::cout << "t (from recoverPose after scale): " << scalePose*t.t() << std::endl;
//manual recover pose
std::cout << "\ncompute_R_t_fromEssentialMatrix:" << std::endl;
std::vector<cv::Mat> rvecs, tvecs, tvecs2;
compute_R_t_fromEssentialMatrix(E, rvecs, tvecs, tvecs2);
for (int i = 0; i < 4; i++) {
std::cout << "\nrvecs[" << i << "]: " << rvecs[i].t() << std::endl;
std::cout << "tvecs[" << i << "]: " << tvecs[i].t() << std::endl;
scalePose = tvec2to1.at<double>(2, 0) / tvecs[i].at<double>(2, 0);
std::cout << "tvecs[" << i << "] (after scale): " << scalePose * tvecs[i].t() << std::endl;
scalePose = tvec2to1.at<double>(2, 0) / tvecs2[i].at<double>(2, 0);
std::cout << "tvecs2[" << i << "] (after scale): " << scalePose * tvecs2[i].t() << std::endl;
}
return 0;
}
| | 2 | No.2 Revision |
Looks like your points are planar?
If so, it is a degenerate configuration to be able to estimate correctly the essential matrix. Have a look at this course:
Or at these two classical books:
I have reported here the relevant slides from the mentioned course:
Since you are using a fisheye lens, I would undistort the images before computing the fundamental matrix.
Here some experiments with the fundamental / essential matrix and pose recovering:
Code:
#include <iostream>
#include <opencv2/opencv.hpp>
void cameraDisplacement(const cv::Mat& rvec1, const cv::Mat& tvec1, const cv::Mat& rvec2, const cv::Mat& tvec2,
cv::Mat& rvec1to2, cv::Mat& tvec1to2) {
cv::Mat R1, R2, R1to2;
cv::Rodrigues(rvec1, R1);
cv::Rodrigues(rvec2, R2);
R1to2 = R2.t() * R1;
R2 * R1.t();
cv::Rodrigues(R1to2, rvec1to2);
tvec1to2 = R2 * (-R1.t()*tvec1) -R1to2*tvec1 + tvec2;
}
void compute_R_t_fromEssentialMatrix(const cv::Mat& E, std::vector<cv::Mat>& rvecs, std::vector<cv::Mat>& ts, std::vector<cv::Mat>& ts2) {
//https://github.com/libmv/libmv/blob/8040c0f6fa8e03547fd4fbfdfaf6d8ffd5d1988b/src/libmv/multiview/fundamental.cc#L302-L338
cv::Mat w, u, vt;
cv::SVDecomp(E, w, u, vt, cv::SVD::FULL_UV);
// Last column of U is undetermined since d = (a a 0).
if (cv::determinant(u) < 0) {
u.col(2) *= -1;
}
// Last row of Vt is undetermined since d = (a a 0).
if (cv::determinant(vt) < 0) {
vt.row(2) *= -1;
}
//std::cout << "vt:\n" << vt << std::endl;
cv::Mat W = (cv::Mat_<double>(3, 3) << 0, -1, 0,
1, 0, 0,
0, 0, 1);
cv::Mat U_W_Vt = u * W * vt;
cv::Mat U_Wt_Vt = u * W.t() * vt;
rvecs.resize(4);
cv::Mat R = U_W_Vt, rvec;
cv::Rodrigues(R, rvec);
rvecs[0] = rvec;
rvecs[1] = rvec;
cv::Mat R2 = U_Wt_Vt, rvec2;
cv::Rodrigues(R2, rvec2);
rvecs[2] = rvec2;
rvecs[3] = rvec2;
ts.resize(4);
ts[0] = u.col(2);
ts[1] = -u.col(2);
ts[2] = u.col(2);
ts[3] = -u.col(2);
//https://en.wikipedia.org/wiki/Essential_matrix#Determining_R_and_t_from_E
ts2.resize(4);
cv::Mat Z = (cv::Mat_<double>(3, 3) << 0, 1, 0,
-1, 0, 0,
0, 0, 0);
cv::Mat tskew = u*Z*u.t();
ts2[0] = (cv::Mat_<double>(3, 1) << tskew.at<double>(2, 1),
tskew.at<double>(0, 2),
tskew.at<double>(1, 0));
ts2[1] = -ts[0];
ts2[2] = ts[0];
ts2[3] = -ts[0];
}
void transform(const cv::Point3d& pt, const cv::Mat& rvec, const cv::Mat& tvec, cv::Point3d& ptTrans) {
cv::Mat R;
cv::Rodrigues(rvec, R);
cv::Mat matPt = (cv::Mat_<double>(3, 1) << pt.x, pt.y, pt.z);
cv::Mat matPtTrans = R * matPt + tvec;
ptTrans.x = matPtTrans.at<double>(0, 0);
ptTrans.y = matPtTrans.at<double>(1, 0);
ptTrans.z = matPtTrans.at<double>(2, 0);
}
void recoverPoseFromPnP(const std::vector<cv::Point3d>& objectPoints1, const cv::Mat& rvec1, const cv::Mat& tvec1, const std::vector<cv::Point2d>& imagePoints2,
const cv::Mat& cameraMatrix, cv::Mat& rvec1to2, cv::Mat& tvec1to2) {
cv::Mat R1;
cv::Rodrigues(rvec1, R1);
//transform object points in camera frame
std::vector<cv::Point3d> objectPoints1InCam;
for (size_t i = 0; i < objectPoints1.size(); i++) {
cv::Point3d ptTrans;
transform(objectPoints1[i], rvec1, tvec1, ptTrans);
objectPoints1InCam.push_back(ptTrans);
}
cv::solvePnP(objectPoints1InCam, imagePoints2, cameraMatrix, cv::noArray(), rvec1to2, tvec1to2, false, cv::SOLVEPNP_EPNP);
}
int main() {
//object points
std::vector<cv::Point3d> objectPoints;
//4 planar points
objectPoints.push_back(cv::Point3d(-0.5, -0.5, 0.0));
objectPoints.push_back(cv::Point3d(0.5, -0.5, 0.0));
objectPoints.push_back(cv::Point3d(0.5, 0.5, 0.0));
objectPoints.push_back(cv::Point3d(-0.5, 0.5, 0.0));
//4 more points
objectPoints.push_back(cv::Point3d(-0.75, 0.22, 0.84));
objectPoints.push_back(cv::Point3d(0.11, -0.67, 1.53));
objectPoints.push_back(cv::Point3d(0.39, 0.08, 0.38));
objectPoints.push_back(cv::Point3d(-0.45, -0.18, 0.23));
//initial camera pose
cv::Mat rvec1 = (cv::Mat_<double>(3, 1) << 5.0*CV_PI / 180.0, -3.0*CV_PI / 180.0, 8.0*CV_PI / 180.0);
cv::Mat tvec1 = (cv::Mat_<double>(3, 1) << 0.1, 0.2, 2.0);
//project points
cv::Mat cameraMatrix = (cv::Mat_<double>(3, 3) << 600.0, 0.0, 320.0,
0.0, 600.0, 240.0,
0.0, 0.0, 1.0);
std::vector<cv::Point2d> imagePoints1;
cv::projectPoints(objectPoints, rvec1, tvec1, cameraMatrix, cv::noArray(), imagePoints1);
for (size_t i = 0; i < imagePoints1.size(); i++) {
std::cout << "imagePoints1[" << i << "]: " << imagePoints1[i] << std::endl;
}
//new camera pose
cv::Mat rvec2 = (cv::Mat_<double>(3, 1) << -3.0*CV_PI / 180.0, -5.0*CV_PI / 180.0, -3.0*CV_PI / 180.0);
cv::Mat tvec2 = (cv::Mat_<double>(3, 1) << 0.15, 0.12, 1.85);
//camera displacement
cv::Mat rvec1to2, tvec1to2;
cameraDisplacement(rvec1, tvec1, rvec2, tvec2, rvec1to2, tvec1to2);
std::cout << "rvec1to2: " << rvec1to2.t() << std::endl;
std::cout << "tvec1to2: " << tvec1to2.t() << std::endl;
//project points using new camera pose
std::vector<cv::Point2d> imagePoints2;
cv::projectPoints(objectPoints, rvec2, tvec2, cameraMatrix, cv::noArray(), imagePoints2);
for (size_t i = 0; i < imagePoints2.size(); i++) {
std::cout << "imagePoints2[" << i << "]: " << imagePoints2[i] << std::endl;
}
//find fundamental matrix
cv::Mat F = cv::findFundamentalMat(imagePoints1, imagePoints2, cv::noArray(), cv::FM_7POINT);
std::cout << "\nF:\n" << F << std::endl;
//calculate error
double meanError = 0.0;
for (size_t i = 0; i < objectPoints.size(); i++) {
cv::Point2d x1 = imagePoints1[i], x2 = imagePoints2[i];
double F0 = F.at<double>(0, 0) * x1.x + F.at<double>(0, 1) * x1.y + F.at<double>(0, 2);
double F1 = F.at<double>(1, 0) * x1.x + F.at<double>(1, 1) * x1.y + F.at<double>(1, 2);
double F2 = F.at<double>(2, 0) * x1.x + F.at<double>(2, 1) * x1.y + F.at<double>(2, 2);
meanError += x2.x * F0 + x2.y * F1 + F2;
}
std::cout << "meanError: " << meanError / objectPoints.size() << std::endl;
//essential matrix
cv::Mat E = cameraMatrix.t() * F * cameraMatrix;
std::cout << "\nE:\n" << E << std::endl;
cv::Mat E2 = cv::findEssentialMat(imagePoints1, imagePoints2, cameraMatrix, cv::LMEDS);
std::cout << "E2:\n" << E2 << std::endl;
double scale = E.at<double>(2, 2) / E2.at<double>(2, 2);
std::cout << "E2:\n" << scale*E2 << std::endl;
//camera displacement from 2 to 1
cv::Mat rvec2to1, tvec2to1;
cameraDisplacement(rvec2, tvec2, rvec1, tvec1, rvec2to1, tvec2to1);
//recover pose
cv::Mat R, t, rvec;
cv::recoverPose(E, imagePoints1, imagePoints2, cameraMatrix, R, t);
cv::Rodrigues(R, rvec);
std::cout << "\nrvec2to1: " << rvec2to1.t() "\nrvec1to2: " << rvec1to2.t() << std::endl;
std::cout << "rvec (from recoverPose): " << rvec.t() << std::endl;
std::cout << "\ntvec2to1: " << tvec2to1.t() "\ntvec1to2: " << tvec1to2.t() << std::endl;
std::cout << "t (from recoverPose): " << t.t() << std::endl;
double scalePose = tvec2to1.at<double>(2, tvec1to2.at<double>(2, 0) / t.at<double>(2, 0);
std::cout << "t (from recoverPose after scale): " << scalePose*t.t() << std::endl;
//manual recover pose
std::cout << "\ncompute_R_t_fromEssentialMatrix:" << std::endl;
std::vector<cv::Mat> rvecs, tvecs, tvecs2;
compute_R_t_fromEssentialMatrix(E, rvecs, tvecs, tvecs2);
for (int i = 0; i < 4; i++) {
std::cout << "\nrvecs[" << i << "]: " << rvecs[i].t() << std::endl;
std::cout << "tvecs[" << i << "]: " << tvecs[i].t() << std::endl;
scalePose = tvec2to1.at<double>(2, tvec1to2.at<double>(2, 0) / tvecs[i].at<double>(2, 0);
std::cout << "tvecs[" << i << "] (after scale): " << scalePose * tvecs[i].t() << std::endl;
scalePose = tvec2to1.at<double>(2, tvec1to2.at<double>(2, 0) / tvecs2[i].at<double>(2, 0);
std::cout << "tvecs2[" << i << "] (after scale): " << scalePose * tvecs2[i].t() << std::endl;
}
//pose from solvePnP and known camera pose for image1
cv::Mat rvec1to2_pnp, tvec1to2_pnp;
recoverPoseFromPnP(objectPoints, rvec1, tvec1, imagePoints2, cameraMatrix, rvec1to2_pnp, tvec1to2_pnp);
std::cout << "\nRecover pose using PnP:" << std::endl;
std::cout << "rvec1to2: " << rvec1to2.t() << std::endl;
std::cout << "rvec1to2_pnp: " << rvec1to2_pnp.t() << std::endl;
std::cout << "tvec1to2: " << tvec1to2.t() << std::endl;
std::cout << "tvec1to2_pnp: " << tvec1to2_pnp.t() << std::endl;
return 0;
}