This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
yolov3 has "region proposals", so each row in your output Mat's represent a candidate detection. the 1st 4 numbers are [center_x, center_y, width, height], followed by (N-4) class probabilities.
i only have yolov3-tiny here, so the output varies a little (only 2 output layers), but it should work in the same way for the "larger" one :
import org.opencv.core.Core;
import org.opencv.core.*;
import org.opencv.dnn.*;
import org.opencv.utils.*;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
import java.util.ArrayList;
import java.util.List;
public class Yolov3 {
private static List<String> getOutputNames(Net net) {
List<String> names = new ArrayList<>();
List<Integer> outLayers = net.getUnconnectedOutLayers().toList();
List<String> layersNames = net.getLayerNames();
outLayers.forEach((item) -> names.add(layersNames.get(item - 1)));
return names;
}
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
String modelWeights = "c:/data/mdl/yolo/yolov3-tiny.weights";
String modelConfiguration = "c:/data/mdl/yolo/yolov3-tiny.cfg";
Net net = Dnn.readNetFromDarknet(modelConfiguration, modelWeights);
Mat image = Imgcodecs.imread("dog.jpg");
Size sz = new Size(416, 416);
Mat blob = Dnn.blobFromImage(image, 0.00392, sz, new Scalar(0), true, false);
net.setInput(blob);
List<Mat> result = new ArrayList<>();
List<String> outBlobNames = getOutputNames(net);
net.forward(result, outBlobNames);
outBlobNames.forEach(System.out::println);
result.forEach(System.out::println);
float confThreshold = 0.6f;
List<Integer> clsIds = new ArrayList<>();
List<Float> confs = new ArrayList<>();
List<Rect> rects = new ArrayList<>();
for (int i = 0; i < result.size(); ++i)
{
// each row is a candidate detection, the 1st 4 numbers are
// [center_x, center_y, width, height], followed by (N-4) class probabilities
Mat level = result.get(i);
for (int j = 0; j < level.rows(); ++j)
{
Mat row = level.row(j);
Mat scores = row.colRange(5, level.cols());
Core.MinMaxLocResult mm = Core.minMaxLoc(scores);
float confidence = (float)mm.maxVal;
Point classIdPoint = mm.maxLoc;
if (confidence > confThreshold)
{
int centerX = (int)(row.get(0,0)[0] * image.cols());
int centerY = (int)(row.get(0,1)[0] * image.rows());
int width = (int)(row.get(0,2)[0] * image.cols());
int height = (int)(row.get(0,3)[0] * image.rows());
int left = centerX - width / 2;
int top = centerY - height / 2;
clsIds.add((int)classIdPoint.x);
confs.add((float)confidence);
rects.add(new Rect(left, top, width, height));
}
}
}
// Apply non-maximum suppression procedure.
float nmsThresh = 0.5f;
MatOfFloat confidences = new MatOfFloat(Converters.vector_float_to_Mat(confs));
Rect[] boxesArray = rects.toArray(new Rect[0]);
MatOfRect boxes = new MatOfRect(boxesArray);
MatOfInt indices = new MatOfInt();
Dnn.NMSBoxes(boxes, confidences, confThreshold, nmsThresh, indices);
// Draw result boxes:
int [] ind = indices.toArray();
for (int i = 0; i < ind.length; ++i)
{
int idx = ind[i];
Rect box = boxesArray[idx];
Imgproc.rectangle(image, box.tl(), box.br(), new Scalar(0,0,255), 2);
System.out.println(box);
}
Imgcodecs.imwrite("out.png", image);
}
}
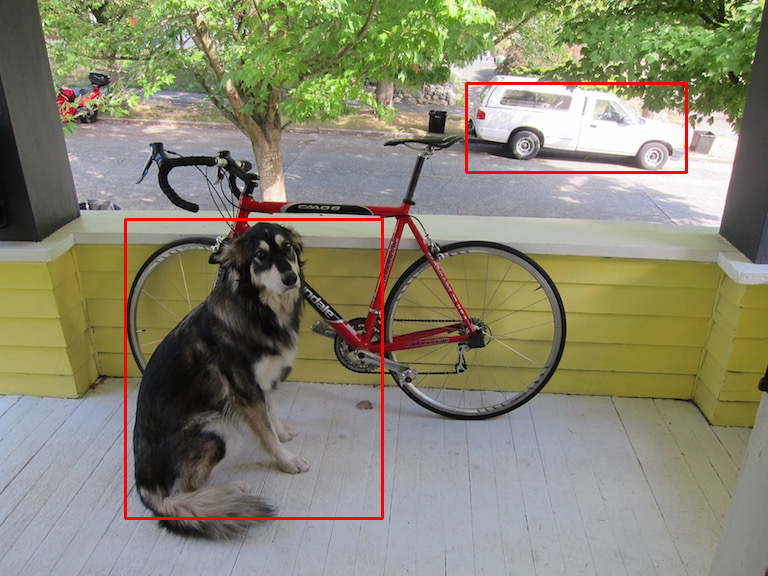
(it missed the bike, but probably better threshold values and a better model can mend that)
| | 2 | No.2 Revision |
yolov3 has "region proposals", so each row in your output Mat's represent represents a candidate detection.
the 1st 4 numbers are [center_x, center_y, width, height], followed by (N-4) class probabilities.
i only have yolov3-tiny here, so the output varies a little (only 2 output layers), but it should work in the same way for the "larger" one :
import org.opencv.core.Core;
import org.opencv.core.*;
import org.opencv.dnn.*;
import org.opencv.utils.*;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
import java.util.ArrayList;
import java.util.List;
public class Yolov3 {
private static List<String> getOutputNames(Net net) {
List<String> names = new ArrayList<>();
List<Integer> outLayers = net.getUnconnectedOutLayers().toList();
List<String> layersNames = net.getLayerNames();
outLayers.forEach((item) -> names.add(layersNames.get(item - 1)));
return names;
}
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
String modelWeights = "c:/data/mdl/yolo/yolov3-tiny.weights";
String modelConfiguration = "c:/data/mdl/yolo/yolov3-tiny.cfg";
Net net = Dnn.readNetFromDarknet(modelConfiguration, modelWeights);
Mat image = Imgcodecs.imread("dog.jpg");
Size sz = new Size(416, 416);
Mat blob = Dnn.blobFromImage(image, 0.00392, sz, new Scalar(0), true, false);
net.setInput(blob);
List<Mat> result = new ArrayList<>();
List<String> outBlobNames = getOutputNames(net);
net.forward(result, outBlobNames);
outBlobNames.forEach(System.out::println);
result.forEach(System.out::println);
float confThreshold = 0.6f;
List<Integer> clsIds = new ArrayList<>();
List<Float> confs = new ArrayList<>();
List<Rect> rects = new ArrayList<>();
for (int i = 0; i < result.size(); ++i)
{
// each row is a candidate detection, the 1st 4 numbers are
// [center_x, center_y, width, height], followed by (N-4) class probabilities
Mat level = result.get(i);
for (int j = 0; j < level.rows(); ++j)
{
Mat row = level.row(j);
Mat scores = row.colRange(5, level.cols());
Core.MinMaxLocResult mm = Core.minMaxLoc(scores);
float confidence = (float)mm.maxVal;
Point classIdPoint = mm.maxLoc;
if (confidence > confThreshold)
{
int centerX = (int)(row.get(0,0)[0] * image.cols());
int centerY = (int)(row.get(0,1)[0] * image.rows());
int width = (int)(row.get(0,2)[0] * image.cols());
int height = (int)(row.get(0,3)[0] * image.rows());
int left = centerX - width / 2;
int top = centerY - height / 2;
clsIds.add((int)classIdPoint.x);
confs.add((float)confidence);
rects.add(new Rect(left, top, width, height));
}
}
}
// Apply non-maximum suppression procedure.
float nmsThresh = 0.5f;
MatOfFloat confidences = new MatOfFloat(Converters.vector_float_to_Mat(confs));
Rect[] boxesArray = rects.toArray(new Rect[0]);
MatOfRect boxes = new MatOfRect(boxesArray);
MatOfInt indices = new MatOfInt();
Dnn.NMSBoxes(boxes, confidences, confThreshold, nmsThresh, indices);
// Draw result boxes:
int [] ind = indices.toArray();
for (int i = 0; i < ind.length; ++i)
{
int idx = ind[i];
Rect box = boxesArray[idx];
Imgproc.rectangle(image, box.tl(), box.br(), new Scalar(0,0,255), 2);
System.out.println(box);
}
Imgcodecs.imwrite("out.png", image);
}
}
(it missed the bike, but probably better threshold values and a better model can mend that)
| | 3 | No.3 Revision |
yolov3 has "region proposals", so each row in your output Mat's represents a candidate detection.
the 1st 4 numbers are [center_x, center_y, width, height], followed by (N-4) class probabilities.
first we need to collect all candidates from all outputs (scales), then we can apply NMS to retain only the most promising ones.
i only have yolov3-tiny here, so the output varies a little (only (it has only 2 output layers), but it should work in the same way for the "larger" one :
import org.opencv.core.Core;
import org.opencv.core.*;
import org.opencv.dnn.*;
import org.opencv.utils.*;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
import java.util.ArrayList;
import java.util.List;
public class Yolov3 {
private static List<String> getOutputNames(Net net) {
List<String> names = new ArrayList<>();
List<Integer> outLayers = net.getUnconnectedOutLayers().toList();
List<String> layersNames = net.getLayerNames();
outLayers.forEach((item) -> names.add(layersNames.get(item - 1)));
return names;
}
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
String modelWeights = "c:/data/mdl/yolo/yolov3-tiny.weights";
String modelConfiguration = "c:/data/mdl/yolo/yolov3-tiny.cfg";
Net net = Dnn.readNetFromDarknet(modelConfiguration, modelWeights);
Mat image = Imgcodecs.imread("dog.jpg");
Size sz = new Size(416, 416);
Mat blob = Dnn.blobFromImage(image, 0.00392, sz, new Scalar(0), true, false);
net.setInput(blob);
List<Mat> result = new ArrayList<>();
List<String> outBlobNames = getOutputNames(net);
net.forward(result, outBlobNames);
outBlobNames.forEach(System.out::println);
result.forEach(System.out::println);
float confThreshold = 0.6f;
List<Integer> clsIds = new ArrayList<>();
List<Float> confs = new ArrayList<>();
List<Rect> rects = new ArrayList<>();
for (int i = 0; i < result.size(); ++i)
{
// each row is a candidate detection, the 1st 4 numbers are
// [center_x, center_y, width, height], followed by (N-4) class probabilities
Mat level = result.get(i);
for (int j = 0; j < level.rows(); ++j)
{
Mat row = level.row(j);
Mat scores = row.colRange(5, level.cols());
Core.MinMaxLocResult mm = Core.minMaxLoc(scores);
float confidence = (float)mm.maxVal;
Point classIdPoint = mm.maxLoc;
if (confidence > confThreshold)
{
int centerX = (int)(row.get(0,0)[0] * image.cols());
int centerY = (int)(row.get(0,1)[0] * image.rows());
int width = (int)(row.get(0,2)[0] * image.cols());
int height = (int)(row.get(0,3)[0] * image.rows());
int left = centerX - width / 2;
int top = centerY - height / 2;
clsIds.add((int)classIdPoint.x);
confs.add((float)confidence);
rects.add(new Rect(left, top, width, height));
}
}
}
// Apply non-maximum suppression procedure.
float nmsThresh = 0.5f;
MatOfFloat confidences = new MatOfFloat(Converters.vector_float_to_Mat(confs));
Rect[] boxesArray = rects.toArray(new Rect[0]);
MatOfRect boxes = new MatOfRect(boxesArray);
MatOfInt indices = new MatOfInt();
Dnn.NMSBoxes(boxes, confidences, confThreshold, nmsThresh, indices);
// Draw result boxes:
int [] ind = indices.toArray();
for (int i = 0; i < ind.length; ++i)
{
int idx = ind[i];
Rect box = boxesArray[idx];
Imgproc.rectangle(image, box.tl(), box.br(), new Scalar(0,0,255), 2);
System.out.println(box);
}
Imgcodecs.imwrite("out.png", image);
}
}
(it missed the bike, but probably better threshold values and a better model can mend that)