This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
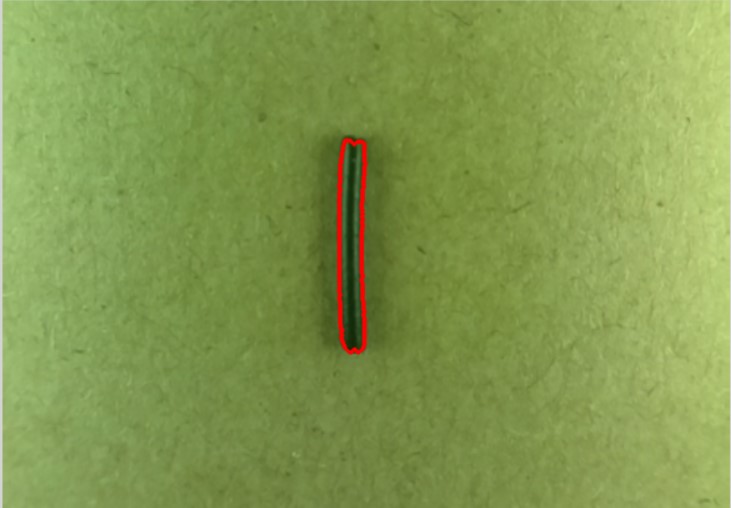
here is my result
here is my suggest code,may it help you .
//answerOpenCV OpenCV / C++ - Filling holes
#include "stdafx.h"
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
//find the biggest contour
vector<Point> FindBigestContour(Mat src){
int imax = 0;
int imaxcontour = -1;
std::vector<std::vector<Point> >contours;
findContours(src,contours,CV_RETR_LIST,CV_CHAIN_APPROX_SIMPLE);
for (int i=0;i<contours.size();i++){
int itmp = contourArea(contours[i]);
if (imaxcontour < itmp ){
imax = i;
imaxcontour = itmp;
}
}
return contours[imax];
}
//remove Light difference by using top hat
Mat moveLightDiff(Mat src,int radius){
Mat dst;
Mat srcclone = src.clone();
Mat mask = Mat::zeros(radius*2,radius*2,CV_8U);
circle(mask,Point(radius,radius),radius,Scalar(255),-1);
//top hat
erode(srcclone,srcclone,mask);
dilate(srcclone,srcclone,mask);
dst = src - srcclone;
return dst;
}
int main( void )
{
Mat src = imread("e:/sandbox/question.png");
Mat src_hsv;
Mat bin;
Mat src_h;
cvtColor(src,src_hsv,COLOR_BGR2HSV);
vector<Mat> rgb_planes;
split(src_hsv, rgb_planes );
src_h = rgb_planes[0]; // h channel is useful
src_h = moveLightDiff(src_h,40);
threshold(src_h,bin,100,255,THRESH_OTSU);
//find and draw the biggest contour
vector<Point> bigestcontrour = FindBigestContour(bin);
vector<vector<Point> > controus;
controus.push_back(bigestcontrour);
cv::drawContours(src,controus,0,Scalar(0,0,255),3);
waitKey();
return 0;
}
