This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Hello, Stephane. Is this what you'd expected?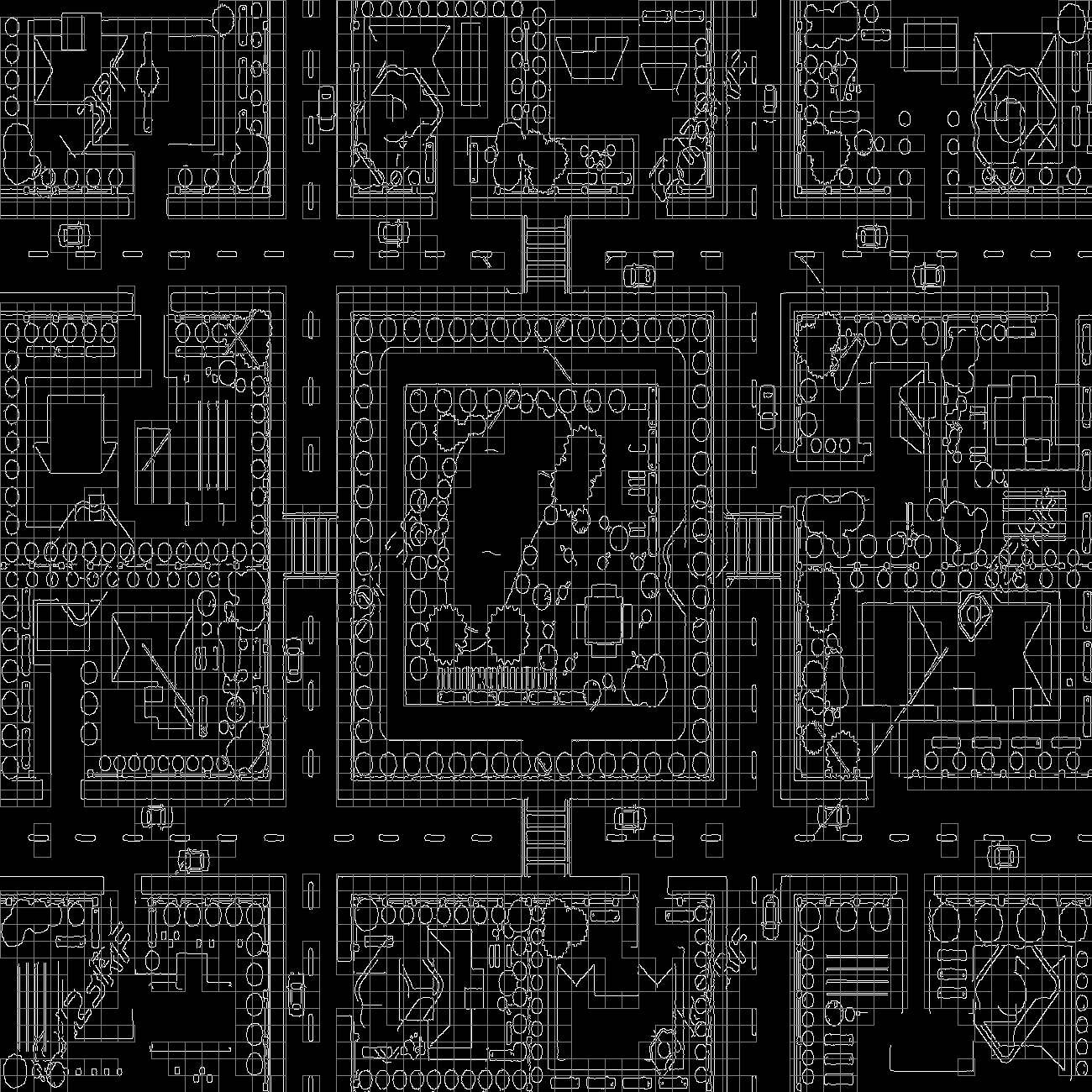
Cancel the thresh operation, otherwise there would be only almost 5 places <= cut_off_point in the whole image as I did the counting.
| | 2 | No.2 Revision |
Hello, Stephane. Is this what you'd expected?
Cancel the thresh operation, otherwise there would be only almost 5 places <= cut_off_point in the whole image as I did the counting.
import cv2
import numpy as np
import scipy.signal
import math
roomimg = cv2.imread("./TXw1CdF.jpg")
# edge detection
# ret, thresh = cv2.threshold(roomimg, 127, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C)
thresh = cv2.cvtColor(roomimg, cv2.COLOR_BGR2GRAY)
edge = cv2.Canny(thresh, 100, 200)
height,width,channels = roomimg.shape
matrix = []
column = []
#define the dimensions of the grid
def estimate_noise(I):
H, W = I.shape
M = [[1, -2, 1],
[-2, 4, -2],
[1, -2, 1]]
sigma = np.sum(np.sum(np.absolute(scipy.signal.convolve2d(np.array(I), M))))
sigma = sigma * np.sqrt(0.5 * np.pi) / (6 * (W-2) * (H-2))
return sigma
boxsize = math.pow(estimate_noise(edge),-0.708)* 112.32
#defines what are obstacles and what are not
cut_off_point = 15
#U HAVE TO CHANGE CUT OFF POINT BASED ON EVERY IMAGE
box_num = 0
for i in range (0,height, int(boxsize)):
for j in range (0,width, int(boxsize)):
#1. DRAW THE BLOCKS
roi_gray = edge[i:i+int(boxsize),j:j+int(boxsize)]
#2. FIND INTENSITY OF ROI
roi_avg_intensity = np.mean(roi_gray)
#3. BASED ON THAT, SEE IF ROI IS AN OBSTACLE OR NOT
if roi_avg_intensity > cut_off_point:
# if box_num < 200:
# print("roi_avg_intensity:", roi_avg_intensity)
cv2.rectangle(edge, (j,i), (j+int(boxsize), i+int(boxsize)),(128,128,2))
box_num += 1
#4. ADD TO ARRAY
cv2.imwrite('./a.jpg', edge)
plt.imshow(edge, cmap='gray')
plt.show()
