This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version | |
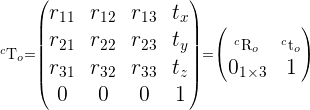
The equations are:
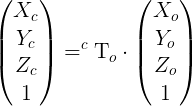
This matrix allows to transform a 3D point expressed in the object frame into the camera frame:
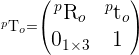

See a robotic course about homogeneous transformation matrix for more information.