This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
The function cv::triangulatePoints() will compute, reconstruct the 3D points in the camera frame (the left camera frame should be the reference, to be checked).
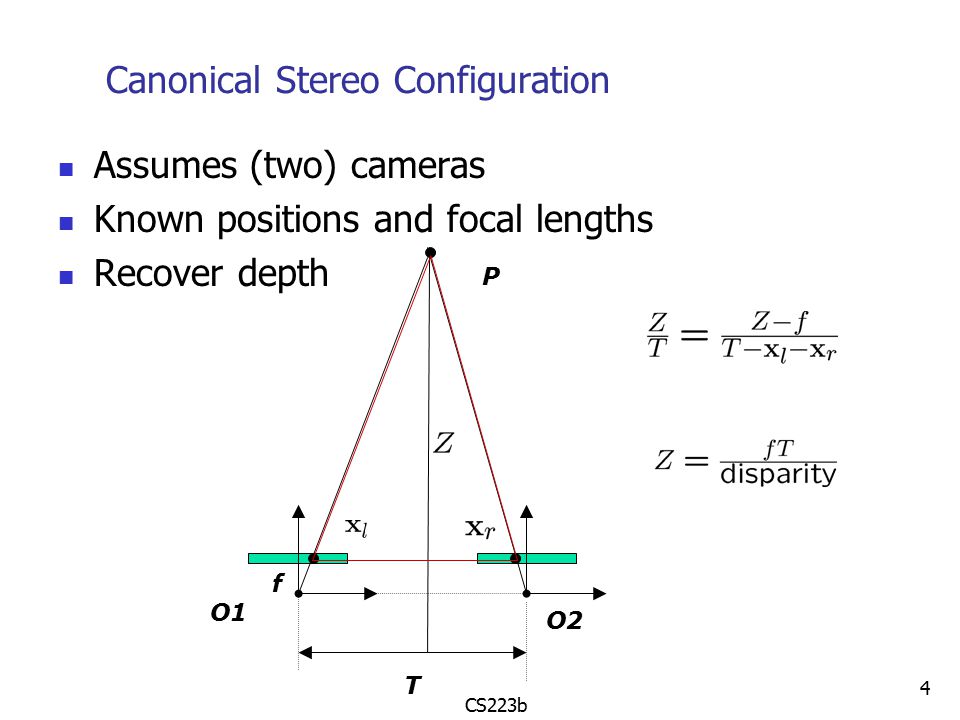
Also, from my knowledge, this function should work only for a stereo camera setup where the two image views are fronto-parallel (the images are rectified with cv::stereoRectify()):
One last thing, cv::triangulatePoints() needs the two projection matrices of the two cameras, that is the transformation between the left and right camera frames. In case of I am wrong and it is possible to use cv::triangulatePoints() with non fronto-parallel views, you will still need to have the relationship, the transformation matrix between the two camera frames (the intrinsic matrix and the pairs of points are not sufficient).