This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
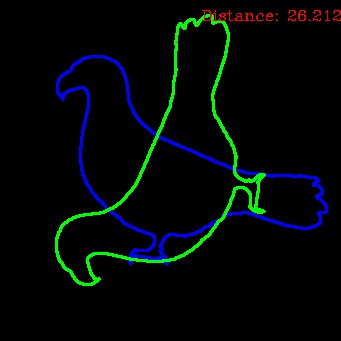
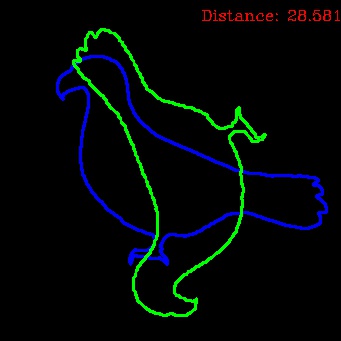
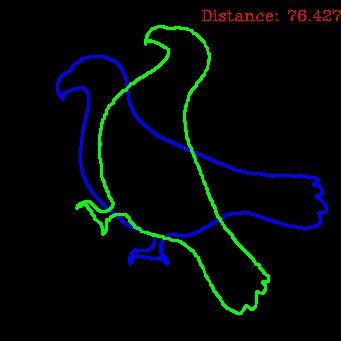
Hi! Here is my Simple Iterative based algorithm for comparing Two Contours! Here i have used only one shape image to demonstrate contour orientation comparison! Hope you will find this useful!
// OpenCV_Find_Contour_Orientation.cpp : Defines the entry point for the console application.
#include <opencv2\opencv.hpp>
#include "opencv2\core.hpp"
#include "opencv2/shape.hpp"
#include "opencv2\opencv_modules.hpp"
#include <iostream>
#include <conio.h>
#include <fstream>
#include <string.h>
#define NOMINMAX
using namespace cv;
using namespace std;
Point RotatePoint(const Mat &R, const Point &p)
{
Point2f rp;
rp.x = (float)(R.at<double>(0,0)*p.x + R.at<double>(0,1)*p.y + R.at<double>(0,2));
rp.y = (float)(R.at<double>(1,0)*p.x + R.at<double>(1,1)*p.y + R.at<double>(1,2));
return rp;
}
bool FindBlobs(Mat mI,vector<vector<Point>> &contours,vector<Point2f> &MassCentre,vector<float>&DiagonalLength)
{
if(mI.empty()||mI.depth()!=CV_8UC1)
{
cout<<"Invalid Input Image!";
return 0;
}
vector<Vec4i> hierarchy;
/// Find contours
findContours( mI, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0) );
vector<Rect> boundRect( contours.size() );
vector<Moments> mu(contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{
/// Find Minimum bounding Rect
boundRect[i] = boundingRect( Mat(contours[i]) );
/// Get the moments
mu[i] = moments( contours[i], false );
/// Find the Mass Centre
MassCentre.push_back(Point2f( static_cast<float>(mu[i].m10/mu[i].m00) , static_cast<float>(mu[i].m01/mu[i].m00) ));
//Find Distance between the TopLeft and Bottrom Right Points
DiagonalLength.push_back((float)norm(boundRect[i].tl()-boundRect[i].br()));
}
return 1;
}
bool TransformContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Trans,Vec2f Translate)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
contours_Trans=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Trans[i][idx]=Point(contours[i][idx].x+ Translate(0),contours[i][idx].y+ Translate(1));
}
}
return 1;
}
bool RotateContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Rotated,double Angle,Point2f Centre)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
Mat mRot= getRotationMatrix2D(Centre,Angle,1.0);
contours_Rotated=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Rotated[i][idx]=RotatePoint(mRot,contours[i][idx]);
}
}
return 1;
}
static vector<Point> simpleContour( vector<vector<Point> > _contoursQuery, int n=300 )
{
vector <Point> contoursQuery;
for (size_t border=0; border<_contoursQuery.size(); border++)
{
for (size_t p=0; p<_contoursQuery[border].size(); p++)
{
contoursQuery.push_back( _contoursQuery[border][p] );
}
}
// In case actual number of points is less than n
int dummy=0;
for (int add=(int)contoursQuery.size()-1; add<n; add++)
{
contoursQuery.push_back(contoursQuery[dummy++]); //adding dummy values
}
// Uniformly sampling
random_shuffle(contoursQuery.begin(), contoursQuery.end());
vector<Point> cont;
for (int i=0; i<n; i++)
{
cont.push_back(contoursQuery[i]);
}
return cont;
}
int _tmain(int argc, _TCHAR* argv[])
{
string sFileName="OpenCV\\opencv-master\\samples\\data\\shape_sample\\6.png";
Mat mSrc;
mSrc= imread(sFileName,0);
if (mSrc.empty()) {
std::cerr << "[Error] imread() ...filename="<<sFileName << std::endl;
return -1;
}
imshow("Source Image",mSrc);
vector<vector<Point>> contours;
vector<Point2f> MassCentre;
vector<float>DiagonalLength;
FindBlobs(mSrc,contours,MassCentre,DiagonalLength);
vector<vector<Point>> contours_Trans(contours.size());
vector<vector<Point>> contours_Rotated(contours.size());
Point2f ptCCentre(DiagonalLength[0]/2,DiagonalLength[0]/2);
Vec2f Translation(ptCCentre.x - MassCentre[0].x,ptCCentre.y - MassCentre[0].y);
//Move the contour Mass Center to the Image Space Centre!
TransformContour(contours,contours_Trans,Translation);
//Just used for Visualisation
Mat mContourSpace(Size(DiagonalLength[0],DiagonalLength[0]),CV_8UC3);
drawContours(mContourSpace,contours_Trans,0, Scalar(255,0,0), 2, 8);
//imshow("Contour Image ",mContourSpace);
Mat mContourMatch;
double Angle=45.0;
char key;
vector<Point> QueryContour,TestContour;
cv::Ptr <cv::ShapeContextDistanceExtractor> mysc = cv::createShapeContextDistanceExtractor();
QueryContour= simpleContour(contours_Trans);
float bestMatch = 0;
float bestDis=FLT_MAX;
for (int i = 0; i < 8; i++)
{
mContourMatch= mContourSpace.clone();
RotateContour(contours_Trans,contours_Rotated,Angle,ptCCentre);
TestContour= simpleContour(contours_Rotated);
float dis = mysc->computeDistance( QueryContour, TestContour);
drawContours( mContourMatch, contours_Rotated , (int)0, Scalar(0,255,0), 2, 8);
putText( mContourMatch, format("Distance: %f ",dis),Point2f(ptCCentre.x+30,20), CV_FONT_HERSHEY_COMPLEX, 0.5,Scalar(0, 0, 255), 0.5);
imshow("Rotated ContourImage ",mContourMatch);
if(Angle>=360)
Angle=0.0;
else
Angle+=45.0;
if ( dis<bestDis )
{
bestMatch = Angle;
bestDis = dis;
}
waitKey(10);
}
cout<< format("Angle: %f , Score: %f",bestMatch,bestDis);
waitKey();
}
| | 2 | No.2 Revision |
Hi! Here is my Simple Iterative based algorithm for comparing Two Contours! Here i have used only one shape image to demonstrate contour orientation comparison! Hope you will find this useful!
// OpenCV_Find_Contour_Orientation.cpp : Defines the entry point for the console application.
#include <opencv2\opencv.hpp>
#include "opencv2\core.hpp"
#include "opencv2/shape.hpp"
#include "opencv2\opencv_modules.hpp"
#include <iostream>
#include <conio.h>
#include <fstream>
#include <string.h>
#define NOMINMAX
using namespace cv;
using namespace std;
Point RotatePoint(const Mat &R, const Point &p)
{
Point2f rp;
rp.x = (float)(R.at<double>(0,0)*p.x + R.at<double>(0,1)*p.y + R.at<double>(0,2));
rp.y = (float)(R.at<double>(1,0)*p.x + R.at<double>(1,1)*p.y + R.at<double>(1,2));
return rp;
}
bool FindBlobs(Mat mI,vector<vector<Point>> &contours,vector<Point2f> &MassCentre,vector<float>&DiagonalLength)
{
if(mI.empty()||mI.depth()!=CV_8UC1)
{
cout<<"Invalid Input Image!";
return 0;
}
vector<Vec4i> hierarchy;
/// Find contours
findContours( mI, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0) );
vector<Rect> boundRect( contours.size() );
vector<Moments> mu(contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{
/// Find Minimum bounding Rect
boundRect[i] = boundingRect( Mat(contours[i]) );
/// Get the moments
mu[i] = moments( contours[i], false );
/// Find the Mass Centre
MassCentre.push_back(Point2f( static_cast<float>(mu[i].m10/mu[i].m00) , static_cast<float>(mu[i].m01/mu[i].m00) ));
//Find Distance between the TopLeft and Bottrom Right Points
DiagonalLength.push_back((float)norm(boundRect[i].tl()-boundRect[i].br()));
}
return 1;
}
bool TransformContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Trans,Vec2f Translate)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
contours_Trans=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Trans[i][idx]=Point(contours[i][idx].x+ Translate(0),contours[i][idx].y+ Translate(1));
}
}
return 1;
}
bool RotateContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Rotated,double Angle,Point2f Centre)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
Mat mRot= getRotationMatrix2D(Centre,Angle,1.0);
contours_Rotated=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Rotated[i][idx]=RotatePoint(mRot,contours[i][idx]);
}
}
return 1;
}
static vector<Point> simpleContour( vector<vector<Point> > _contoursQuery, int n=300 )
{
vector <Point> contoursQuery;
for (size_t border=0; border<_contoursQuery.size(); border++)
{
for (size_t p=0; p<_contoursQuery[border].size(); p++)
{
contoursQuery.push_back( _contoursQuery[border][p] );
}
}
// In case actual number of points is less than n
int dummy=0;
for (int add=(int)contoursQuery.size()-1; add<n; add++)
{
contoursQuery.push_back(contoursQuery[dummy++]); //adding dummy values
}
// Uniformly sampling
random_shuffle(contoursQuery.begin(), contoursQuery.end());
vector<Point> cont;
for (int i=0; i<n; i++)
{
cont.push_back(contoursQuery[i]);
}
return cont;
}
int _tmain(int argc, _TCHAR* argv[])
{
string sFileName="OpenCV\\opencv-master\\samples\\data\\shape_sample\\6.png";
Mat mSrc;
mSrc= imread(sFileName,0);
if (mSrc.empty()) {
std::cerr << "[Error] imread() ...filename="<<sFileName << std::endl;
return -1;
}
imshow("Source Image",mSrc);
vector<vector<Point>> contours;
vector<Point2f> MassCentre;
vector<float>DiagonalLength;
FindBlobs(mSrc,contours,MassCentre,DiagonalLength);
vector<vector<Point>> contours_Trans(contours.size());
vector<vector<Point>> contours_Rotated(contours.size());
Point2f ptCCentre(DiagonalLength[0]/2,DiagonalLength[0]/2);
Vec2f Translation(ptCCentre.x - MassCentre[0].x,ptCCentre.y - MassCentre[0].y);
//Move the contour Mass Center to the Image Space Centre!
TransformContour(contours,contours_Trans,Translation);
//Just used for Visualisation
Mat mContourSpace(Size(DiagonalLength[0],DiagonalLength[0]),CV_8UC3);
drawContours(mContourSpace,contours_Trans,0, Scalar(255,0,0), 2, 8);
//imshow("Contour Image ",mContourSpace);
Mat mContourMatch;
double Angle=45.0;
char key;
vector<Point> QueryContour,TestContour;
cv::Ptr <cv::ShapeContextDistanceExtractor> mysc = cv::createShapeContextDistanceExtractor();
QueryContour= simpleContour(contours_Trans);
float bestMatch = 0;
float bestDis=FLT_MAX;
for (int i = 0; i < 8; i++)
{
mContourMatch= mContourSpace.clone();
RotateContour(contours_Trans,contours_Rotated,Angle,ptCCentre);
TestContour= simpleContour(contours_Rotated);
float dis = mysc->computeDistance( QueryContour, TestContour);
drawContours( mContourMatch, contours_Rotated , (int)0, Scalar(0,255,0), 2, 8);
putText( mContourMatch, format("Distance: %f ",dis),Point2f(ptCCentre.x+30,20), CV_FONT_HERSHEY_COMPLEX, 0.5,Scalar(0, 0, 255), 0.5);
imshow("Rotated ContourImage ",mContourMatch);
if(Angle>=360)
Angle=0.0;
else
Angle+=45.0;
if ( dis<bestDis )
{
bestMatch = Angle;
bestDis = dis;
}
waitKey(10);
}
cout<< format("Angle: %f , Score: %f",bestMatch,bestDis);
waitKey();
}
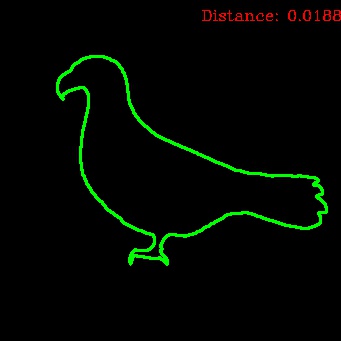
Here is the Sample Outputs:
Output : Angle: 0.000000 , Score: 0.018856
| | 3 | No.3 Revision |
Hi! Here is my Simple Iterative based algorithm for comparing Two Contours! Here i have used only one shape image to demonstrate contour orientation comparison! Hope you will find this useful!
Here is the Sample Outputs:
Output : Angle: 0.000000 , Score: 0.018856
// OpenCV_Find_Contour_Orientation.cpp : Defines the entry point for the console application.
#include <opencv2\opencv.hpp>
#include "opencv2\core.hpp"
#include "opencv2/shape.hpp"
#include "opencv2\opencv_modules.hpp"
#include <iostream>
#include <conio.h>
#include <fstream>
#include <string.h>
#define NOMINMAX
using namespace cv;
using namespace std;
Point RotatePoint(const Mat &R, const Point &p)
{
Point2f rp;
rp.x = (float)(R.at<double>(0,0)*p.x + R.at<double>(0,1)*p.y + R.at<double>(0,2));
rp.y = (float)(R.at<double>(1,0)*p.x + R.at<double>(1,1)*p.y + R.at<double>(1,2));
return rp;
}
bool FindBlobs(Mat mI,vector<vector<Point>> &contours,vector<Point2f> &MassCentre,vector<float>&DiagonalLength)
{
if(mI.empty()||mI.depth()!=CV_8UC1)
{
cout<<"Invalid Input Image!";
return 0;
}
vector<Vec4i> hierarchy;
/// Find contours
findContours( mI, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0) );
vector<Rect> boundRect( contours.size() );
vector<Moments> mu(contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{
/// Find Minimum bounding Rect
boundRect[i] = boundingRect( Mat(contours[i]) );
/// Get the moments
mu[i] = moments( contours[i], false );
/// Find the Mass Centre
MassCentre.push_back(Point2f( static_cast<float>(mu[i].m10/mu[i].m00) , static_cast<float>(mu[i].m01/mu[i].m00) ));
//Find Distance between the TopLeft and Bottrom Right Points
DiagonalLength.push_back((float)norm(boundRect[i].tl()-boundRect[i].br()));
}
return 1;
}
bool TransformContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Trans,Vec2f Translate)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
contours_Trans=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Trans[i][idx]=Point(contours[i][idx].x+ Translate(0),contours[i][idx].y+ Translate(1));
}
}
return 1;
}
bool RotateContour(vector<vector<Point>> contours,vector<vector<Point>> &contours_Rotated,double Angle,Point2f Centre)
{
if(contours.size()==0)
{
cout<<"Invalid input!";
return 0;
}
Mat mRot= getRotationMatrix2D(Centre,Angle,1.0);
contours_Rotated=contours;
for( size_t i = 0; i < contours.size(); i++ )
{
for (int idx = 0; idx < contours[i].size(); idx++)
{
contours_Rotated[i][idx]=RotatePoint(mRot,contours[i][idx]);
}
}
return 1;
}
static vector<Point> simpleContour( vector<vector<Point> > _contoursQuery, int n=300 )
{
vector <Point> contoursQuery;
for (size_t border=0; border<_contoursQuery.size(); border++)
{
for (size_t p=0; p<_contoursQuery[border].size(); p++)
{
contoursQuery.push_back( _contoursQuery[border][p] );
}
}
// In case actual number of points is less than n
int dummy=0;
for (int add=(int)contoursQuery.size()-1; add<n; add++)
{
contoursQuery.push_back(contoursQuery[dummy++]); //adding dummy values
}
// Uniformly sampling
random_shuffle(contoursQuery.begin(), contoursQuery.end());
vector<Point> cont;
for (int i=0; i<n; i++)
{
cont.push_back(contoursQuery[i]);
}
return cont;
}
int _tmain(int argc, _TCHAR* argv[])
{
string sFileName="OpenCV\\opencv-master\\samples\\data\\shape_sample\\6.png";
Mat mSrc;
mSrc= imread(sFileName,0);
if (mSrc.empty()) {
std::cerr << "[Error] imread() ...filename="<<sFileName << std::endl;
return -1;
}
imshow("Source Image",mSrc);
vector<vector<Point>> contours;
vector<Point2f> MassCentre;
vector<float>DiagonalLength;
FindBlobs(mSrc,contours,MassCentre,DiagonalLength);
vector<vector<Point>> contours_Trans(contours.size());
vector<vector<Point>> contours_Rotated(contours.size());
Point2f ptCCentre(DiagonalLength[0]/2,DiagonalLength[0]/2);
Vec2f Translation(ptCCentre.x - MassCentre[0].x,ptCCentre.y - MassCentre[0].y);
//Move the contour Mass Center to the Image Space Centre!
TransformContour(contours,contours_Trans,Translation);
//Just used for Visualisation
Mat mContourSpace(Size(DiagonalLength[0],DiagonalLength[0]),CV_8UC3);
drawContours(mContourSpace,contours_Trans,0, Scalar(255,0,0), 2, 8);
//imshow("Contour Image ",mContourSpace);
Mat mContourMatch;
double Angle=45.0;
char key;
vector<Point> QueryContour,TestContour;
cv::Ptr <cv::ShapeContextDistanceExtractor> mysc = cv::createShapeContextDistanceExtractor();
QueryContour= simpleContour(contours_Trans);
float bestMatch = 0;
float bestDis=FLT_MAX;
for (int i = 0; i < 8; i++)
{
mContourMatch= mContourSpace.clone();
RotateContour(contours_Trans,contours_Rotated,Angle,ptCCentre);
TestContour= simpleContour(contours_Rotated);
float dis = mysc->computeDistance( QueryContour, TestContour);
drawContours( mContourMatch, contours_Rotated , (int)0, Scalar(0,255,0), 2, 8);
putText( mContourMatch, format("Distance: %f ",dis),Point2f(ptCCentre.x+30,20), CV_FONT_HERSHEY_COMPLEX, 0.5,Scalar(0, 0, 255), 0.5);
imshow("Rotated ContourImage ",mContourMatch);
if(Angle>=360)
Angle=0.0;
else
Angle+=45.0;
if ( dis<bestDis )
{
bestMatch = Angle;
bestDis = dis;
}
waitKey(10);
}
cout<< format("Angle: %f , Score: %f",bestMatch,bestDis);
waitKey();
}
Here is the Sample Outputs:
Output : Angle: 0.000000 , Score: 0.018856

