This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
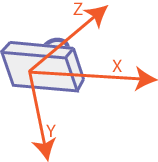
triangulatePoints returns 4 values per point. The first 3 are the coordinates of the point, but they all have to be divided by the fourth value. The coordinate system originates in the optical center of the first camera (left) with the x-axis pointing to the right, the y-axis pointing downwards (!) and the z-axis pointing away from the camera like this:
The units are the ones used during the calibration. For example I used a square size of 0.07m, so the results will be in meters as well.