This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
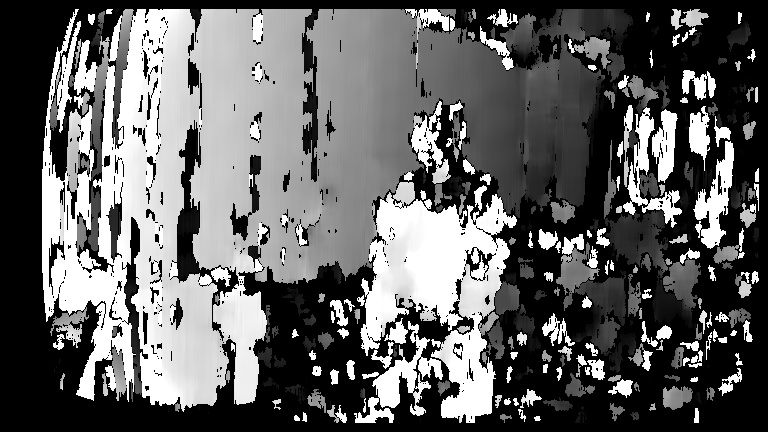
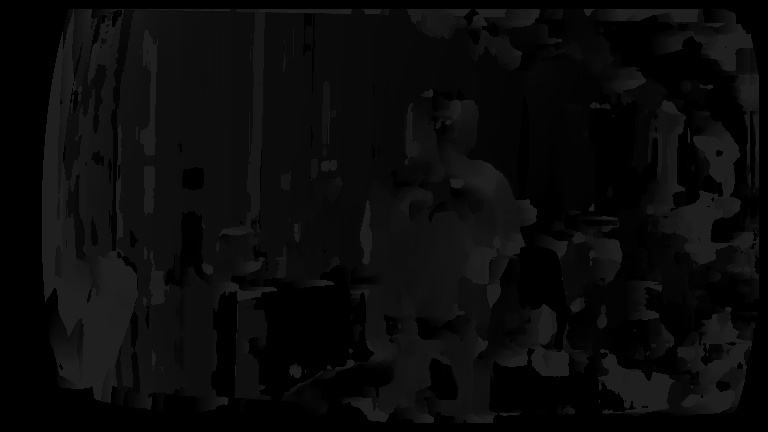
A good comparison would be the disparity maps for StereoBM vs CUDA StereoBM. These are the results that I got for the same parameters on these two implementations.
{bm_minDisparity: 0, numDisparities: 32, bm_SADWindowSize: 19, bm_disp12MaxDiff: 48, bm_preFilterCap: 25, bm_textureThreshold: 5, bm_preFilterSize: 5, bm_uniquenessRatio: 5, bm_speckleWindowSize: 25, bm_speckleRange: 10}
It turns out that the disparity maps that they return are of different types CV_16S vs CV_8U respectively. So I'm guessing there is some bit arithmetic wreaking havoc here.