This forum is disabled, please visit https://forum.opencv.org
| 2018-01-03 20:37:24 -0600 | asked a question | Inhibit Warnings when building iOS opencv2.framework Inhibit Warnings when building iOS opencv2.framework I'm using some modules from the "contrib" repository, so I need to |
| 2017-04-24 03:36:20 -0600 | commented question | Recommended Detector for this kind of image? Okay thanks, ill try that. |
| 2017-04-24 03:35:37 -0600 | received badge | ● Enthusiast |
| 2017-04-19 19:59:55 -0600 | commented question | Recommended Detector for this kind of image? But template matching is not good when perspective transformations are involved. Is it? The end goal is to detect this through a camera, so the markers will most likely be distorted somehow. |
| 2017-04-17 21:48:42 -0600 | commented question | Recommended Detector for this kind of image? They are freely moving. Yeah it's kind of like an AR system, but they are enclosed to that area delimited by the delimiting bars with the arrows. |
| 2017-04-17 19:12:48 -0600 | commented question | Recommended Detector for this kind of image? Yeah, I already succeeded in detecting the markers. However the end goal is to try to create a 2d representation (in the device) of the 3D elements position. It has to be as exact as possible, so i need something that defines the top and bottom of my screen, then i can get the distance and position in reference to the delimiter and recreate the position on the device. Without the delimiters i wouldn't have a reference point. Think of it as a "drawing board". So i need something to tell me where the edge of the board are in the real world. |
| 2017-04-17 01:54:40 -0600 | asked a question | Recommended Detector for this kind of image? Hello, I'm looking for advice in detecting this specific image:
This will be used as a "Delimiter" so there will be 2 of these (one above and one below) which will tell me what area to crop from my current video feed.
To picture how the video feed looks like. Image placing one of these markers on a table with the arrow pointing down. Then a few cms beneath there will be another marker with the arrow pointing up. First I'm uncertain if the best approach is using a Feature Detector. But i think it's the right way to go since the video feed will not be looking straight from above most of the time, but instead with a bit of an inclination. The detector that OpenCV seems to suppor are:
Among these detectors, both SIFT and SURF are out of the question since they are not free. Any feedback will be greatly appreciated. |
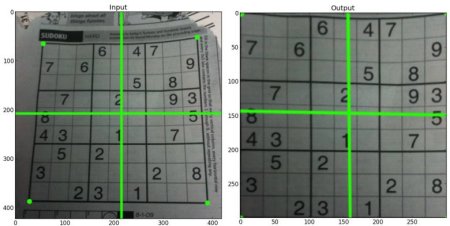
| 2017-04-16 22:32:52 -0600 | commented question | Perspective transformation without camera intrinsic/extrinsic matrix? Sorry, I think i wasn't clear enough. The sudoku image is just an example of the perspective transform to show how it requires 4 points. The actual image I want to transform has only a known width but the height is completely variable (it could be smaller or bigger than the width depending on how far from each other the top and bottom markers are placed). |
| 2017-04-14 03:21:41 -0600 | commented question | Perspective transformation without camera intrinsic/extrinsic matrix? Aaaaaa, would you be some kind as to give me some pointers on how to achieve it? |
| 2017-04-14 01:32:19 -0600 | commented question | Perspective transformation without camera intrinsic/extrinsic matrix? @berak Yeah, but the distance between both markers (which defines the height of the yellow area) is also unknown. As sometimes the markers might appear further away from each other. (The goal of this is to create a variable-height area for processing stuff inside it.) Or do you mean the rectangle as in the black markers? |
| 2017-04-14 00:59:29 -0600 | commented question | Perspective transformation without camera intrinsic/extrinsic matrix? @berak thanks alot. I added an image and some clarification points below. |
| 2017-04-14 00:55:28 -0600 | received badge | ● Editor (source) |
| 2017-04-14 00:53:16 -0600 | commented question | Perspective transformation without camera intrinsic/extrinsic matrix? Would love to, but I don't have enough karma for it, actually, i'll just upload it somewhere else and paste the URL. Even though i can't show normal links either, lol. |
| 2017-04-14 00:52:07 -0600 | answered a question | How to save cv::mat in opencv c++ function to image file in IOS for debugging 1) Include this header 2) Use the OpenCV's "MatToUIImage(...)" to transform your Mat to an UIImage. 3) Save the UIImage using the standard methods. (Swift code, but you can figure out the Objective-C counterpart for it) |
| 2017-04-14 00:50:04 -0600 | asked a question | Perspective transformation without camera intrinsic/extrinsic matrix? I'm a bit confused in whether something can be accomplished or not. Supposing I have 2 identical delimiting shapes: Which I position on a uniform plane parallel to each other so that they form a rectangle between them. Can I obtain the perspective transformation needed to go from what a video camera sees (perspective view) to a 2D representation of it? Based on this link: (http://docs.opencv.org/3.0-beta/doc/p...)
I need to specify 4 points for the input, and another 4 points for the output. The input 4 points are known, since I can detect the top left/right corners of my top marker, and the bottom left/right corners of my bottom marker. The problem lies in the 4 points required for the output. I know what the width of the final image should be (which is equal to my marker width) but i don't know what the height should be (as the markers CAN be positioned with a variable distance between each other). Is there a way to calculate this distance somehow? (I somehow believe there must be an alternative to using the intrinsic/extrinsic matrices since I know before hand the dimensions of both of my markers.)
Just to be clear:
|
| 2014-02-26 23:03:18 -0600 | received badge | ● Supporter (source) |