This forum is disabled, please visit https://forum.opencv.org
| 2020-08-03 22:13:20 -0600 | received badge | ● Popular Question (source) |
| 2020-07-19 04:11:57 -0600 | received badge | ● Notable Question (source) |
| 2019-10-23 03:51:09 -0600 | received badge | ● Popular Question (source) |
| 2019-09-15 10:42:42 -0600 | received badge | ● Notable Question (source) |
| 2018-10-26 22:51:13 -0600 | received badge | ● Popular Question (source) |
| 2018-04-05 09:00:19 -0600 | commented question | Perform a Principle component analysis(PCA) Yes, you are right. I didn't realize that i need to convert it to float32/float64. I just used object = np.transpose(n |
| 2018-04-05 08:58:38 -0600 | commented question | Perform a Principle component analysis(PCA) Yes, you are right. I didn't realize that i need to convert it to float32/float64. I just used object = np.transpose(np |
| 2018-04-05 06:34:16 -0600 | asked a question | Perform a Principle component analysis(PCA) Perform a Principle component analysis(PCA) I am trying to perform PCA on a binary mask of an image. Mask is of shape(48 |
| 2018-03-19 03:55:32 -0600 | asked a question | Image restoration Image restoration Hi, I am looking to restore images which are taken from a moving platform. Restoration filter woul |
| 2018-03-16 02:05:35 -0600 | received badge | ● Student (source) |
| 2018-03-15 11:19:57 -0600 | commented question | Cut an image into 2 parts based on a line I am sorry. Now I am realizing that my question does make any sense. If i cut the image along the line as left image and |
| 2018-03-15 11:19:08 -0600 | edited question | Cut an image into 2 parts based on a line Split an image into 2 parts based on a line Hi, I am looking to split an image into two parts. After doing some math |
| 2018-03-15 11:12:27 -0600 | commented question | Cut an image into 2 parts based on a line I am sorry. Now I am realizing that my question does make any sense. If i cut the image along the line as left image and |
| 2018-03-15 10:29:52 -0600 | commented question | Cut an image into 2 parts based on a line What do u mean by overlapping ? From HoughLinesP function i get two points on the line. I extrapolated the line to get t |
| 2018-03-15 10:25:53 -0600 | edited question | Cut an image into 2 parts based on a line Split an image into 2 parts based on a line Hi, I am looking to split an image into two parts. After doing some math |
| 2018-03-15 09:04:01 -0600 | asked a question | Cut an image into 2 parts based on a line Split an image into 2 parts based on a line Hi, I am looking split an image into two parts. After doing some math in |
| 2018-02-22 06:05:08 -0600 | asked a question | Fit a rectangle/any specific structure in an image Fit a rectangle/any specific structure in an image Hi, I am trying to identify the bins in the image and separate them |
| 2018-02-21 05:59:09 -0600 | received badge | ● Enthusiast |
| 2018-02-19 04:29:25 -0600 | asked a question | Obtain continuous closed contour Obtain continuous closed contour Hi, This contour lines are directly produced from the code taken from "Finding contou |
| 2018-02-19 03:54:49 -0600 | edited question | Separate a closed contour from an image Separate a closed contour from an image Hi, Above is the attached image of the lobster after applying the canny edge. |
| 2018-02-19 03:46:30 -0600 | asked a question | Separate a closed contour from an image Separate a closed contour from an image Hi, Above is the attached image of the lobster after applying the canny edge. |
| 2017-07-27 15:45:50 -0600 | commented question | Stereo camera calibration Thank you for the comment. Previously, i was working with only 14 image pair. Now i tried with 29. I see the epipolar lines matching nicely unlike above image. But RMS error = 1.56 average epipolar error = 2.6 . still remain higher. My square size is 20mm. The argument for variable S should in mm right. |
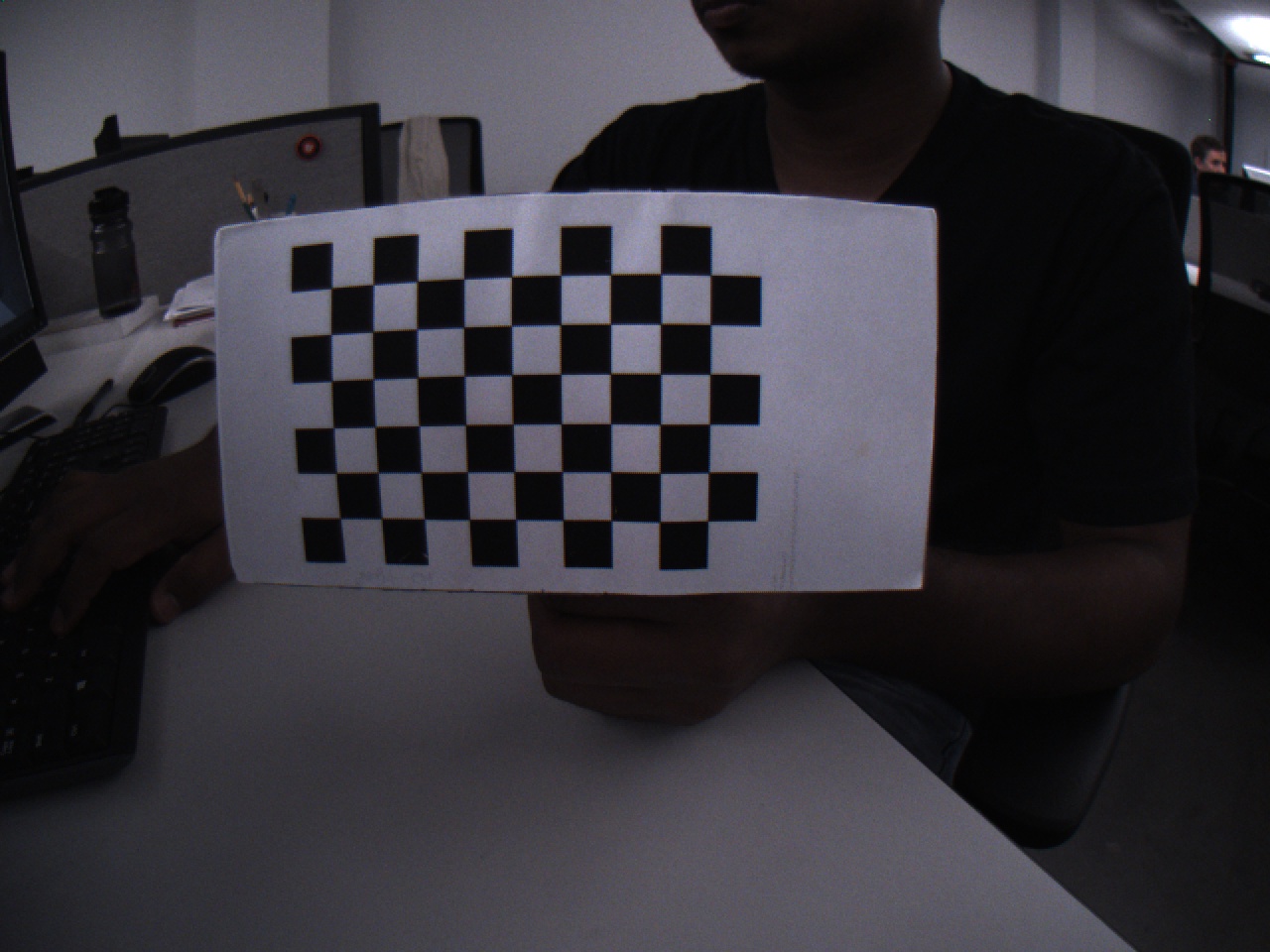
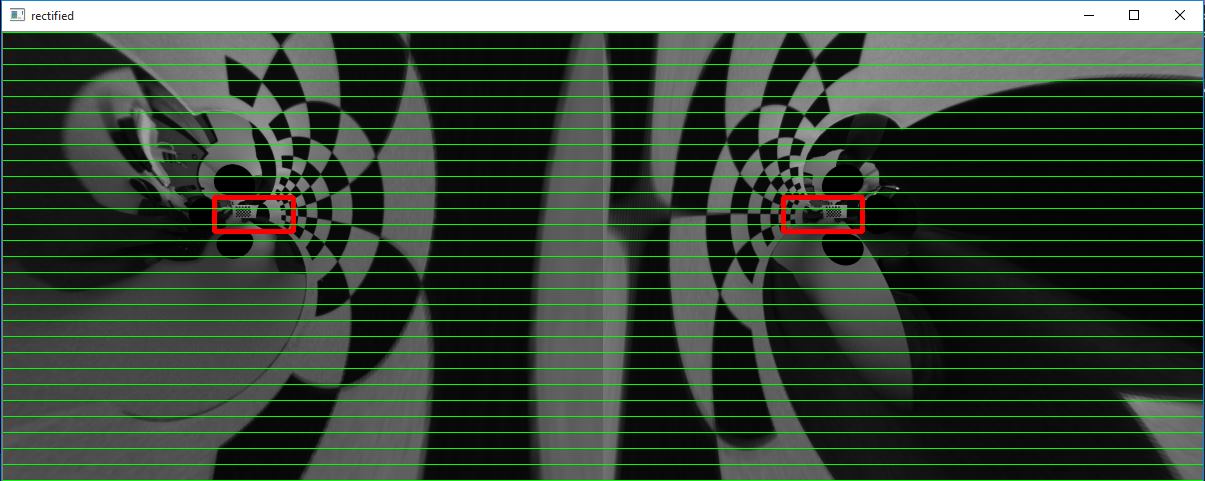
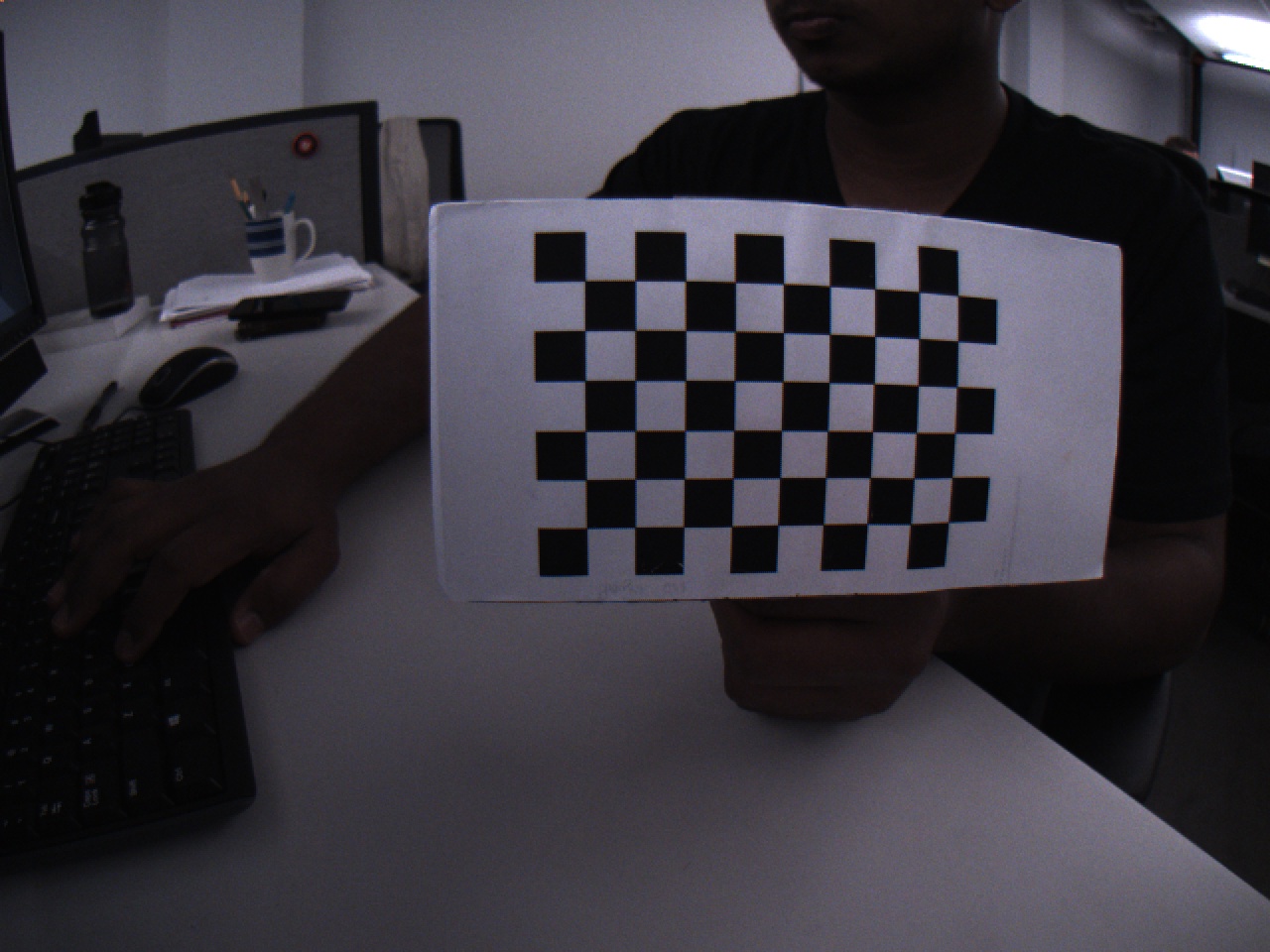
| 2017-07-26 18:07:16 -0600 | asked a question | Stereo camera calibration I ran stereo calibration RMS error = 2.5624 average epipolar err = 2.79867 I am not sure, if these values make sense. Left Image
Right Image
Rectified image
|
| 2017-07-26 13:26:02 -0600 | commented question | Point Grey camera interface with opencv I am using windows. There is no error after compiling the code but no windows is showing up and code is terminating instantly. Its working well with point grey software. I also interfaced with opencv C++ following their tutorial. Actually, i want to input video for camera calibration. |
| 2017-07-26 13:20:20 -0600 | commented answer | Point Grey camera interface with opencv Hi , Thanks for response. I was doing the way you mentioned before. But for the purpose of calibration using opencv, i want to choose video as an input. In the file "in_VID5.xml" is not working. I am wondering if there is way i can input point grey camera video as an input for the camera calibration. |
| 2017-07-25 18:51:20 -0600 | asked a question | Point Grey camera interface with opencv I have a point grey camera USB3 type and connect it to my computer using USB 3.0 port. I came across this code recently. But not sure how to use. I am not sure how to use this code with my camera. Please help. |
| 2017-03-30 01:37:22 -0600 | commented question | 3D textured object model and object mesh. I am sorry, my question isn't clear I guess. I edited it. I am trying to take video/lot of pictures of environment and convert it into 3D model |
| 2017-03-30 01:35:34 -0600 | received badge | ● Editor (source) |
| 2017-03-30 00:52:57 -0600 | asked a question | 3D textured object model and object mesh. Hi I am thinking of model an outdoor environment (probable around 5000 sq.ft or even more). Later on,i want to estimate camera pose based on the image that i captured in the environment.(by matching my descriptors of the model with that in the image). I saw a tutorial in OpenCV - Real time pose estimation of a textured object. But is mentioned that the program only works for a planar objects. I am not sure which software should i need to use to make a 3D textured model from environment. Thinking of flying quad copter over a small area and converting it into model. Any thoughts about this or web links that can address this, would be greatly appreciated. Thanks |
| 2017-02-12 14:08:59 -0600 | commented question | Draw a line on an image using equation of line rather than 2 points. Thanks, I didn't know that!! |
| 2017-02-12 00:20:14 -0600 | asked a question | Draw a line on an image using equation of line rather than 2 points. I am using Visual Studio, OpenCV 3.2.0. I want to draw a line on an image . I know the coefficients (a,b,c values in ax+by+c=0). Is there a way to draw a line rather than specifying two points? |
| 2017-02-08 15:11:27 -0600 | commented answer | OpenCV C++ converting Vector to Mat Thanks for your reply. It's working |
| 2017-02-08 15:02:24 -0600 | asked a question | OpenCV C++ converting Vector to Mat Hi I have 2 vectors and i want to perform cross and dot product operations on them. When i print them my both va and VA are not the same !!!! |
| 2017-02-08 01:04:28 -0600 | commented question | Converting CV::Mat to double * Hi, It looked like this P2 820 615 255 188 188 188 190 ......... |
| 2017-02-07 22:51:58 -0600 | asked a question | Accessing elements of CV:Mat Hi I am using C++ openCV-3.2.0 version. I read .pgm image cv::Mat pgm_image; pgm_image = cv::imread("image.pgm"); and i am trying to access elements of pgm_image (cv::Mat) i tried using std::cout << pgm_image .at<double>(0,0) << std::endl; I am unable to print anything and program is aborting ? Am i doing anything wrong here ? Code is printing the matrix when i use std::cout << pgm_image << std::endl; |
| 2017-02-07 22:48:13 -0600 | asked a question | Converting CV::Mat to double * Hi, I am using C++ openCV-3.2.0 version. I am also using a library for line segment detection,which takes only .pgm image of data type double *. I used cv::Mat pgm_image; pgm_image = cv::imread("image.pgm"); double *I = pgm_image.ptr<double>(0); to read the image and to for getting pointer. And i tried parsing double * into the library that i am using. Is there any way around this? or Is there a way read .pgm file directly as double* ? |
 (/upfiles/15011100969575928.jpg)
(/upfiles/15011100969575928.jpg)