This forum is disabled, please visit https://forum.opencv.org
| 2020-07-19 10:59:13 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-19 10:45:44 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-19 10:44:42 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-19 09:18:19 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-19 08:08:43 -0600 | received badge | ● Student (source) |
| 2020-07-19 07:19:13 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-19 06:56:17 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-19 06:52:38 -0600 | commented question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Thanks @berak I follow your suggestion and explicitly present a simple program to reproduce my findings. (Appended my qu |
| 2020-07-19 06:51:03 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-18 19:20:26 -0600 | edited question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-07-18 19:19:31 -0600 | asked a question | Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Why cv:: encode gives similar size of output buffer for bgr8 and mono8 images? Hello I notice 4.1 MB/s @50fps 1280x720 |
| 2020-03-17 05:16:22 -0600 | commented question | How to bound zebra crossing stripes? @LBerger Thank you for spotting a good paper for me. Let me go through it and see if I can come up with a robust solutio |
| 2020-03-14 04:52:21 -0600 | edited question | How to bound zebra crossing stripes? How to bound zebra crossing stripes? Hello I understand that this a more direct question. Input: Output: I know bas |
| 2020-03-14 04:51:30 -0600 | edited question | How to bound zebra crossing stripes? How to bound zebra crossing stripes? Hello I understand that this a more direct question. Input: Output: I know bas |
| 2020-03-13 15:36:35 -0600 | asked a question | How to bound zebra crossing stripes? How to bound zebra crossing stripes? Hello I understand that this a more direct question. Input: Output: I know bas |
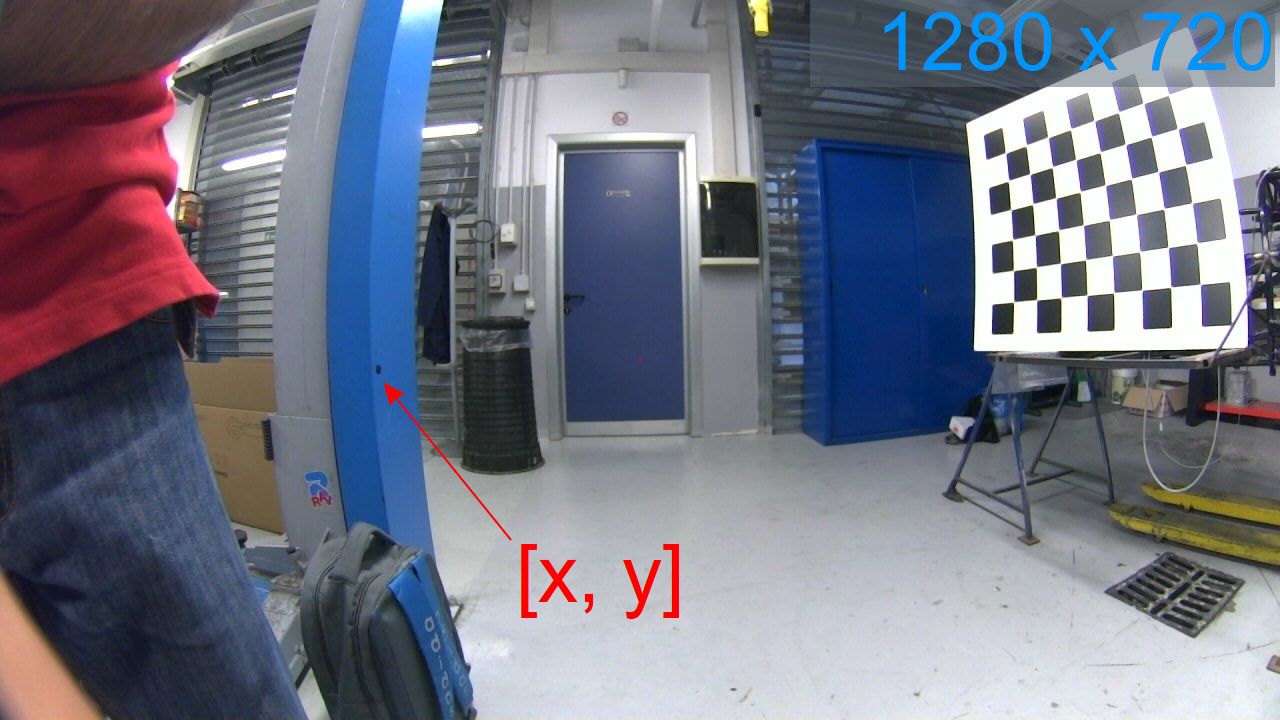
| 2020-01-25 04:19:23 -0600 | marked best answer | [SOLVED]How to project points from undistort image to distort image? I undistorted the fisheye lens image with help of
How to find x and y ? |
| 2020-01-24 20:54:59 -0600 | received badge | ● Self-Learner (source) |
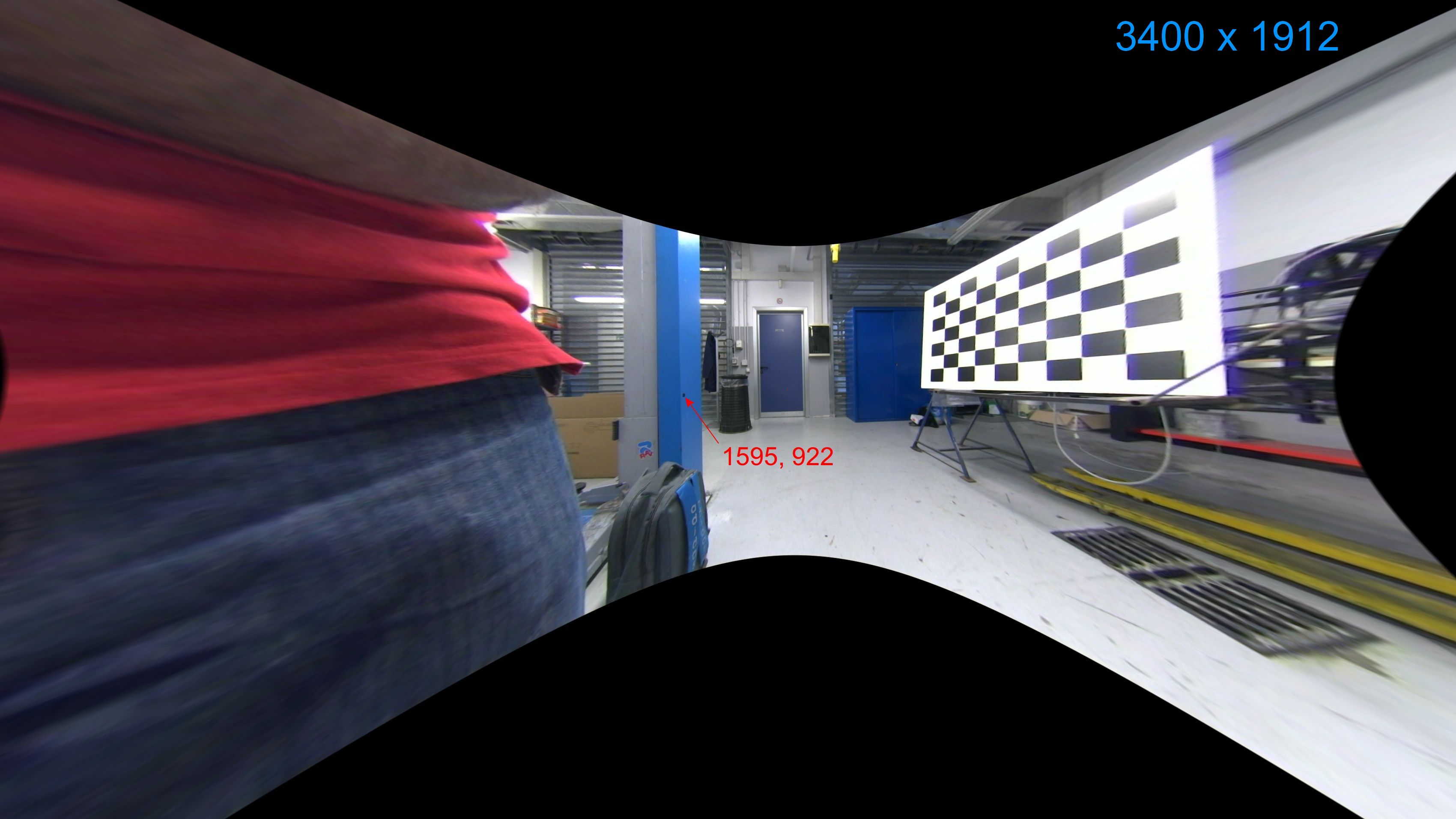
| 2020-01-23 04:23:06 -0600 | answered a question | [SOLVED]How to project points from undistort image to distort image? objp = np.array([[[(1595-new_K[0, 2])/new_K[0, 0], (922-new_K[1, 2])/new_K[1, 1], 0.]]]) rvec = np.array([[[0., 0., 0.]] |
| 2020-01-20 08:47:26 -0600 | asked a question | [SOLVED]How to project points from undistort image to distort image? How to project points from undistort image to distort image? I undistorted the fisheye lens image with help of cv::fishe |
| 2020-01-02 10:32:52 -0600 | edited question | How to combine Color conversion(BGRA->BGR) and Remap operations? How to combine Color conversion(BGRA->BGR) and Remap operations? I want to convert a distorted BGRx image to undistor |
| 2020-01-01 15:28:35 -0600 | edited question | How to combine Color conversion(BGRA->BGR) and Remap operations? How to combine Color conversion(BGRA->BGR) and Remap? OpenCV I want to convert a distorted BGRx image to undistorted |
| 2020-01-01 15:27:55 -0600 | asked a question | How to combine Color conversion(BGRA->BGR) and Remap operations? How to combine Color conversion(BGRA->BGR) and Remap? OpenCV I want to convert a distorted BGRx image to undistorted |
| 2019-10-31 10:16:19 -0600 | received badge | ● Self-Learner (source) |
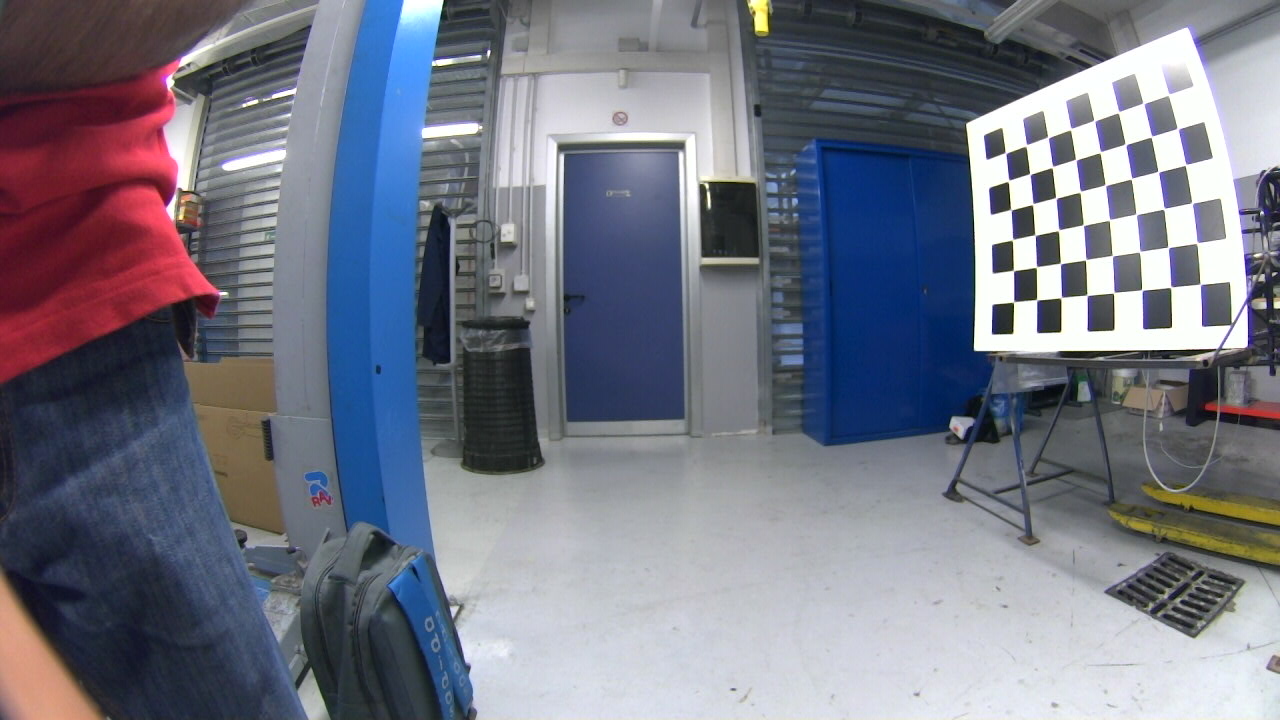
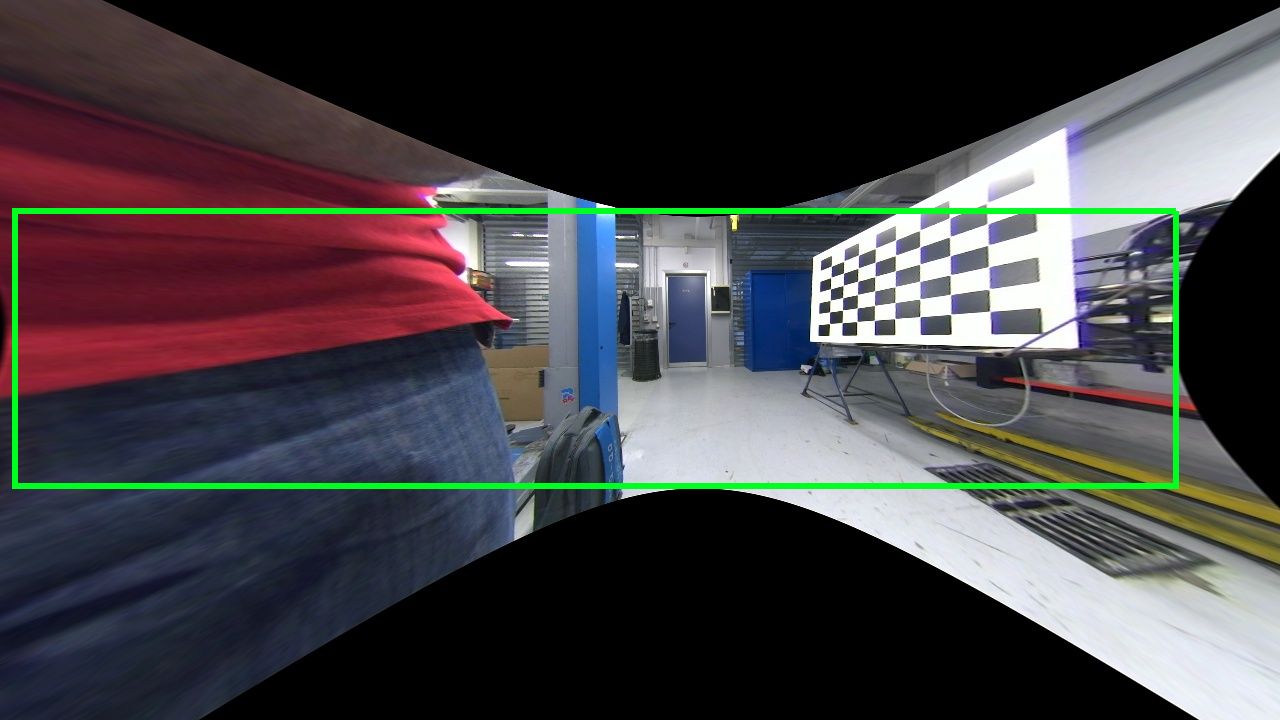
| 2019-10-30 11:54:58 -0600 | marked best answer | How to Undistort fisheye image into max bounding rectangle?
I have calibrated camera with And performed un-distortion with
How can I achieve max obtainable rectangular image? If I directly crop this image, quality deteriotes :( I guess I have to play with |
| 2019-10-30 11:54:17 -0600 | answered a question | How to Undistort fisheye image into max bounding rectangle? new_K = cv2.fisheye.estimateNewCameraMatrixForUndistortRectify(K, D, (1280, 720), np.eye(3), balance=1, new_size=(3400, |
| 2019-10-28 14:27:47 -0600 | edited question | How to Undistort fisheye image into max bounding rectangle? How to Undistort fisheye image into max bounding rectangle? I have calibrated camera with cv2.fisheye.calibrate with i |
| 2019-10-28 11:26:19 -0600 | edited question | How to Undistort fisheye image into max bounding rectangle? How to Undistort fisheye image into max bounding rectangle? I have calibrated camera with cv2.fisheye.calibrate with i |
| 2019-10-28 11:24:48 -0600 | asked a question | How to Undistort fisheye image into max bounding rectangle? How to Undistort fisheye image into max bounding rectangle? I have calibrated camera with cv2.fisheye.calibrate with i |
| 2019-09-15 14:11:06 -0600 | edited question | Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Hello I have NV12 (YUV 4:2:0) image data. I am able to con |
| 2019-09-15 14:09:54 -0600 | edited question | Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Is YUV2BGR_NV12 conversion is necessary to imshow an YUV image? Hello I have NV12 (YUV 4:2:0) image data. I am able to |
| 2019-09-15 12:08:00 -0600 | edited question | Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Is YUV2BGR_NV12 conversion is necessary to imshow an YUV image? Hello I have NV12 (YUV 4:2:0) image data. I am able to |
| 2019-09-15 12:07:45 -0600 | edited question | Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Is YUV2BGR_NV12 conversion is necessory to imshow an YUV image? Hello I have NV12 (YUV 4:2:0) image data. I am able to |
| 2019-09-15 12:07:42 -0600 | edited question | Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Is YUV2BGR_NV12 conversion is necessory to imshow an YUV image? Hello I have NV12 (YUV 4:2:0) image data. I am able to |
| 2019-09-15 12:06:31 -0600 | edited question | Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Is YUV2BGR_NV12 conversion is necessory to imshow an YUV image? Hello I have NV12 (YUV 4:2:0) image data. I am able to |
| 2019-09-15 12:05:48 -0600 | asked a question | Is YUV2BGR_NV12 conversion necessary to imshow an YUV image? Is YUV2BGR_NV12 conversion is necessory to imshow an YUV image? Hello I have NV12 (YUV 4:2:0) image data. I am able to |
| 2019-07-16 16:36:33 -0600 | edited question | How to grow bright pixels in grey region? How to grow bright pixels in grey region? How can I grow bright pixel in grey region? Input: Ouput: Note: bright |
| 2019-07-16 16:36:02 -0600 | asked a question | How to grow bright pixels in grey region? How to grow bright pixels in grey region? How can I grow bright pixel in gry region? Input: Ouput: Note: bright p |
| 2019-04-09 11:59:47 -0600 | marked best answer | How to update cv::namedwindow in multi-threading environment? If 1 callback receives an image and performs some image-processing. How can the output image be shown in multi-threading environment? By multi-threading I mean, if that particular callback(depthCallback) can be invoked by more than one thread. And, one more query: Is using waitkey(1), optimal for real-time application? |
| 2019-04-09 09:55:45 -0600 | edited question | How to initialize array of cv::Mat with rows, cols and value? How to initialize array of cv::Mat with rows, cols and value? How to initialize an array with 10 Mat's? cv::Mat im[10]( |
| 2019-04-09 09:54:59 -0600 | asked a question | How to initialize array of cv::Mat with rows, cols and value? How to initialize array of cv::Mat with rows, cols and value? How to initialize an array with 10 Mat's? cv::Mat im[10]( |
| 2019-04-03 09:21:10 -0600 | asked a question | How to efficiently represent blobs in binary image with ellipse? How to efficiently represent blobs in binary image with ellipse? I want to represent blobs with oriented ellipse. I hav |
| 2019-03-30 04:51:46 -0600 | commented question | How to update cv::namedwindow in multi-threading environment? In single threading ros::spin(), above code runs well. And update image normally. In multi-threading ros::AsyncSpinner s |