This forum is disabled, please visit https://forum.opencv.org
| 2019-10-24 03:53:10 -0600 | received badge | ● Nice Answer (source) |
| 2017-09-11 10:48:03 -0600 | commented question | C++ - Y'CbCr422 to RGB - convert from raw data file Isn't rawSize should be 3 * DEFAULT_FRAME_Y * DEFAULT_FRAME_X; ? |
| 2017-07-26 06:30:48 -0600 | commented question | Point Grey camera interface with opencv What error did you get when you execute this code ? Are using Windows or Ubuntu ? |
| 2017-07-26 06:23:09 -0600 | commented question | Using HoughLinesP to straighten skewed receipt scans Can you post original RGB image, may be you could directly find the rectangle and can align easily. |
| 2015-03-31 10:16:47 -0600 | commented question | line segments from same line showing different angles yes this is from laser data , when i use the angle of segment for calculating distance between lines its giving wrong result. |
| 2015-03-31 09:30:57 -0600 | commented question | line segments from same line showing different angles thanks for suggestions, Since i needsegment start and endpoint for furthur calculations increasing maxLineGap is not an option. Also for fitline() i dont know in advance which segments are from sameline. |
| 2015-03-31 08:13:18 -0600 | asked a question | line segments from same line showing different angles Hi, I am using HoughLinesP to calculate lines from image. But the line segments from same line have different angles.
the segments start and end points and angle (in degrees) and length. To calculate angle i used I am expecting same angle since the segments are part of same line. Is there a way to improve the angle calculation or improving line detection ? thanks. |
| 2015-03-27 11:01:55 -0600 | commented question | How to link the matched features with lines matching part was missing, |
| 2015-03-27 06:53:59 -0600 | commented answer | How to replace part of the image with another image ROI i just put complete code lines, let me know it its working and gives you required result. |
| 2015-03-27 03:44:49 -0600 | commented question | [c++] VideoCapture always returns a null image how did you check the device id of your camera ? |
| 2015-03-26 07:30:58 -0600 | answered a question | How to replace part of the image with another image ROI change to above change gives.
Update : |
| 2015-03-19 14:57:30 -0600 | commented question | Where can I find resources for Computer Vision theory? @wuling add your link as answer. |
| 2015-03-11 15:38:18 -0600 | commented question | Android - Rotating an Image try removing |
| 2015-03-11 10:52:11 -0600 | received badge | ● Scholar (source) |
| 2015-03-10 06:15:22 -0600 | received badge | ● Enthusiast |
| 2015-03-05 23:20:09 -0600 | received badge | ● Nice Answer (source) |
| 2015-03-05 15:14:44 -0600 | commented answer | Improving line extraction from HoughLinesP thanks for the answer. Yes this result was better. But using 5° is not good for my case. Since i was using line angle for further calculation. Also i can see that the line 38 from a edge because of line. I am using it with 1° and you answer is helpful. |
| 2015-03-05 04:13:18 -0600 | commented question | Improving line extraction from HoughLinesP i tried with 1° and 5° but the result was same. |
| 2015-03-05 03:02:28 -0600 | received badge | ● Teacher (source) |
| 2015-03-04 11:52:08 -0600 | commented question | Improving line extraction from HoughLinesP i tried it and didnt solve, here the issue i guess due to width of the edge |
| 2015-03-04 11:47:41 -0600 | answered a question | OpenCV: BGR to YUV conversion In c++ use In python |
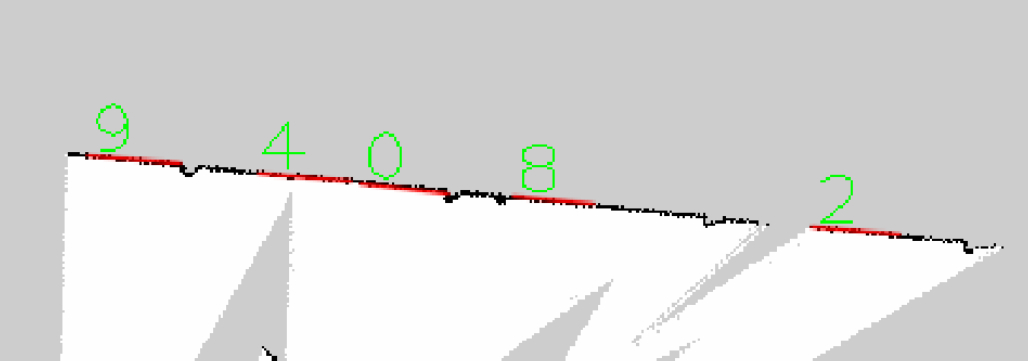
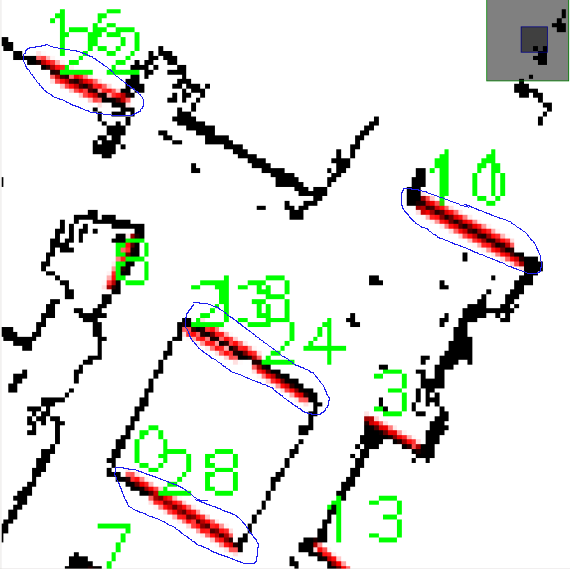
| 2015-03-04 08:55:57 -0600 | asked a question | Improving line extraction from HoughLinesP Hi, I am using Below is my psudo code. As seen in below image single edge (i.e single line in image) is returning more than one line. 16,22 and 0,28 and 10,11 and 23,18,24 lines correspond to single line. How can i get single line for single edge, any suggestions ? Input image:
Extracted lines
Zoomed image
thanks. |
| 2015-02-17 05:09:19 -0600 | received badge | ● Student (source) |
| 2015-01-14 02:17:22 -0600 | received badge | ● Necromancer (source) |
| 2015-01-13 12:06:03 -0600 | answered a question | Changing line colors randomly. You can do it by generating random color using |
| 2014-11-20 11:00:07 -0600 | commented question | How to find the best match between two curves, part-to-whole Did you try Hausdorff distance ? |
| 2014-11-19 19:03:16 -0600 | received badge | ● Supporter (source) |
| 2014-11-03 03:16:17 -0600 | received badge | ● Editor (source) |
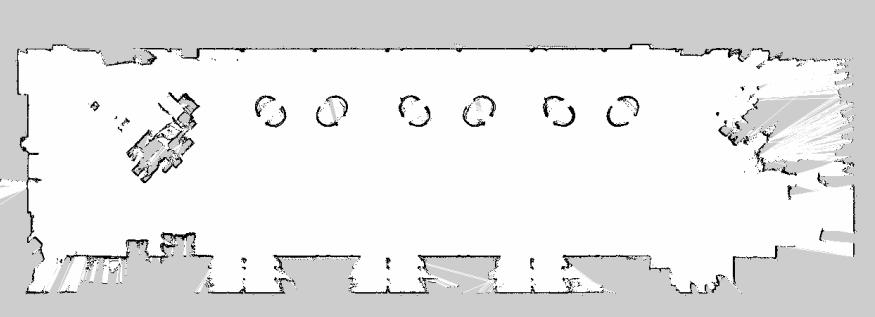
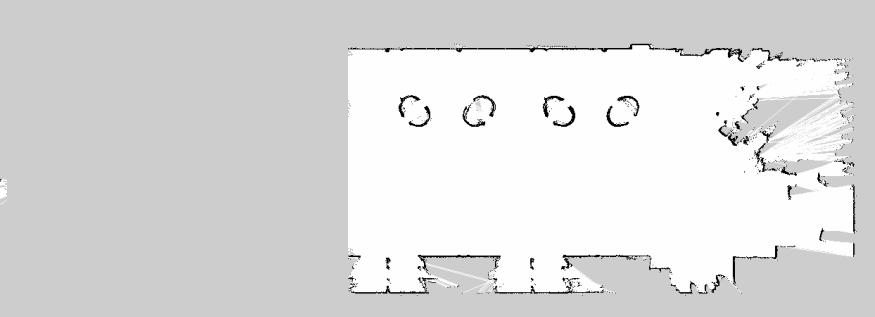
| 2014-10-29 12:34:52 -0600 | asked a question | Keypoint matching on Occupancy grid maps Hi all , I am using ROS Mapstitch package based on Opencv to find transformation bewtween maps ( grayscale images of same size and resolution) to combine them. The implementation is based on opencvs estimateRigidTransform function, ORB feature extraction and matching the distance of pairwise feature candidates For my input files the result from Can somebody has any suggestion or know anyother existing methods to improve the result. input image1
input image 2
keypoint matching
I can see Keypoints are matching to wrong location. In Ideal case upperwall keypoint should match to upperwall. result
Thanks. |
| 2014-10-22 07:27:18 -0600 | received badge | ● Necromancer (source) |
| 2014-10-22 05:39:39 -0600 | answered a question | getting compilation error with estimateRigidTransform Add below header, it solves |