This forum is disabled, please visit https://forum.opencv.org
| 2017-05-25 03:56:55 -0600 | received badge | ● Notable Question (source) |
| 2015-11-06 04:05:15 -0600 | received badge | ● Popular Question (source) |
| 2013-08-10 02:49:53 -0600 | commented answer | Which matcher is best for SURF? yes I have. |
| 2013-02-21 11:54:56 -0600 | commented answer | 2.4.2 Android - missing nonfree package I would need that tutorial aswell |
| 2013-01-10 04:26:40 -0600 | answered a question | how to use SURF to compare two images from image database Depends in what invironment you are coding, I would recommend listeners, and strore the image in database in Mat format, meaning you read the jpg for example, get them Mat descriptors, and store them with the Mat to file function I think I have seen something smiilar, but you have to google it (save mat to file or smtng). And on the server I would recommend multiple threads to compare each file saved at the same time with the camera image. I would suggest the RobustMatcher shown here Robust Matcher it filters bad results, and gives you a good answer after the SURF is done, from 1600 matches it filters the 10-50 good ones out. |
| 2012-12-07 11:29:46 -0600 | received badge | ● Necromancer (source) |
| 2012-12-06 00:25:56 -0600 | commented answer | Nvidia Geforce 520M vs 540M for OpenCV That is good as well, I might have gone for the 640M with 384 cores, but it is good that you got the 600 series it with the Kepler. |
| 2012-12-05 13:29:15 -0600 | answered a question | Nvidia Geforce 520M vs 540M for OpenCV I would look at 600 family if i where you. It is in the same price range for some reason, but 3 times the cuda cores. I am the owner of a msi gtx 650 and with 384 cuda cores it has the same number as 560 ti. You are looking for a laptop card I would go with a 640M. |
| 2012-12-02 07:30:05 -0600 | asked a question | Sample OpenCv Android apk Export Hello I want to export the android project as a stanalone apk so I can install it later on a phone. But is there a procedure, am I in need of adding something to the porject to be able to do this, because at this point the project works when I debug and transfer it to the phone, but it doesn't when I export it and try to install again. Any leads maybe? What am I doing wrong Peter |
| 2012-12-02 01:31:29 -0600 | asked a question | OpenCv android tutorial problem blue Hello I am looking at the android tutorial and wanted to save an iamge to the sd card of my phone, but the resolution is small, and on top of that the image is kinda bluish and all distorted. I can not tell where the problem is. I am not setting any color changes, is this a problem or am i doing something wrong. The image gets displayed correctly. I am using CameraBridgeViewBase to acces the camera it's in tutorial 3 add native support P |
| 2012-12-01 13:28:39 -0600 | commented answer | getting video to play fullscreen android the bug was fixed 4 days ago, how can we get the fixed version of the code? |
| 2012-11-29 23:54:24 -0600 | commented answer | Image matching problem Digit matching is no an option as it is banknotes i want to check and if I have some numbers drawn on a piece of paper and my software tells me it's money that is a bad result |
| 2012-11-25 05:41:57 -0600 | commented question | Image matching problem I have added the images and the code. |
| 2012-11-25 05:41:26 -0600 | received badge | ● Editor (source) |
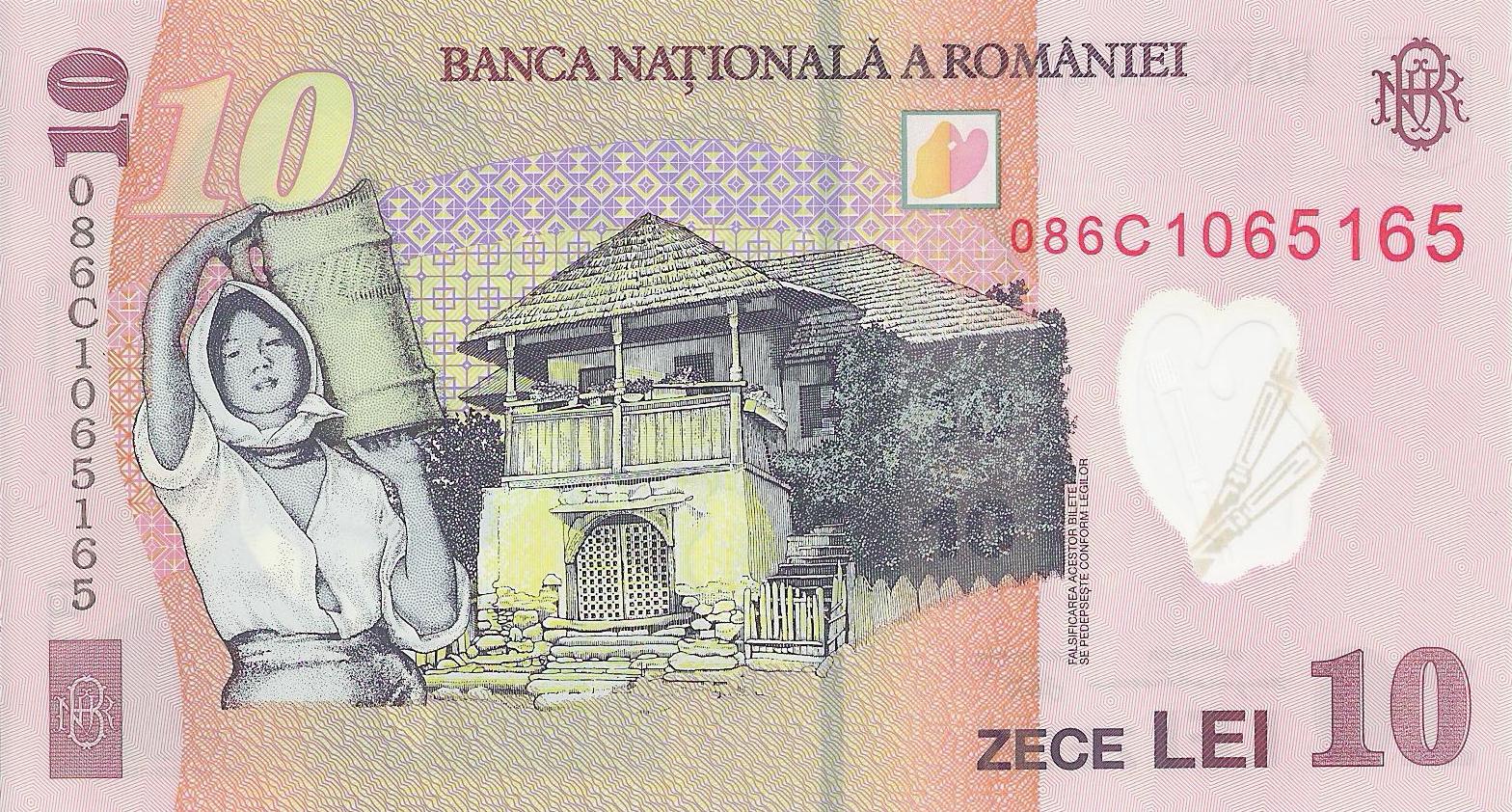
| 2012-11-24 08:16:35 -0600 | asked a question | Image matching problem Hello I want to amtch images of banknotes of witch i have photos and compare them to the image taken recently, so that I can determin witch kinde of banknote I took a photo of. I am loading the banknotes into a vector<mat> and iterate thru them and compare each to the photo just taken. I have used the FLANN based amtching example as a starting point, but the matching done there has a lot of errors points are matched utterly wrong, and that messes up my matching process. The images are kinda similar, as in the banknotes have some similarities, but that shoudn't be the problem, as the example shows the points are matched exactly. So my question would be is there an optimal way to match banknotes? Maybe there is a flaw in my matching settings. These are some of my sample Images:
And these are the two images that I want to compare them to:
with this code i load all my files: And with the Orb matcher I compare the new files to the dataset: } And with this loop I check them all: |
| 2012-11-15 16:31:46 -0600 | received badge | ● Student (source) |
| 2012-11-15 12:57:48 -0600 | commented answer | MatOfDMatch how can it be used? thank you got the job done :) |
| 2012-11-14 10:30:58 -0600 | commented answer | Which matcher is best for SURF? ok. My email address is [email protected], in the mean time I fixed the code, but am having trouble porting it to andtoid. I am using the ndk to acheive this. |
| 2012-11-13 09:17:27 -0600 | commented answer | OrbFeatureDetector issue If i increase it to 300 then it will crash at detect command, if i set it to 15 it will go tru to compare line |
| 2012-11-11 05:48:13 -0600 | commented answer | Which matcher is best for SURF? with flann based matching my code breaks down. Is it maybe because the images are not same size? |
| 2012-11-11 05:47:08 -0600 | answered a question | Which matcher is best for SURF? Hello I am alsow working on an android project for image recognition of a set of images from sd card to the camera indicated ones. Have you completed youre work? Could you help me with a few questions? My tought process is like this: 1: load all images from sd card, calculate their keypoints, then theirs descriptions in Mat, and store them in a List<mat> data container; 2: when the camera is initialized I get one image, turn it to grayscale, get their keyPoints, the descriptions, and do a Brute Force matching to he descriptor just calculated with a loop taking all previously loaded descriptors. Then there is the MatOfDMath result, and there I have some issues. I am trying to get the good_matches List, but all the distances are 0 in the match result. I am saving the largest best_matches container to be the one witch is my image from the loaded ones, but it is not working. Any ideas? |
| 2012-11-11 00:41:38 -0600 | asked a question | MatOfDMatch how can it be used? I am using android to compare some images, and I get the keypoints detecting done, the descriptionextraction, and then the matching of the two descriptors. I get the matched MatOfDMatch, but I don't quite get how I evaluate it. Any pointers? Imgproc.cvtColor(mRgba, mGray, Imgproc.COLOR_RGBA2GRAY); detector.detect(mGray, keypoints); descriptorExtractor.compute(mGray, keypoints, descriptors); MatOfDMatch temp = new MatOfDMatch(); matcher.match(descriptors,trained, temp); And then? Peter |
| 2012-11-10 10:49:31 -0600 | commented question | Cannot Do Anything With OpenCV Anymore on Windows 7 64-bit Yes i have the same Issue, but I have managed to fix some basic functionality like image loading but image comparison just didn;t want to compile SURF or FANN neither. |
| 2012-11-10 07:41:56 -0600 | asked a question | OrbFeatureDetector issue Hello I am having trouble with detecting KeyPoint s with the OrbFeatureDetector, this is my code, it is taken from the Surf example, but as I understand it has the same functionality. the keypoints vector gets filled with -1274509 the max value it can support I'm thinking. And at the compute part it crashes. What am I doing wrong? Pls help. Peter |