This forum is disabled, please visit https://forum.opencv.org
| 2017-06-07 06:00:40 -0600 | received badge | ● Notable Question (source) |
| 2016-04-17 08:54:15 -0600 | received badge | ● Nice Answer (source) |
| 2015-05-25 10:02:13 -0600 | received badge | ● Popular Question (source) |
| 2014-02-06 00:39:18 -0600 | received badge | ● Taxonomist |
| 2013-09-13 12:57:13 -0600 | received badge | ● Supporter (source) |
| 2012-08-16 15:07:18 -0600 | commented answer | Which machine vision camera vendors provide OpenCV support? Reading cap_ximea.cpp we can find a nice set of properties, for example CV_CAP_PROP_XI_AUTO_WB and CV_CAP_PROP_XI_EXP_PRIORITY. I understand it is probably a subset of the full features in a SDK, but I think it's really nice if the machine vision camera vendor is committed with OpenCV support. And what's the problem with "high-quality machine vision cameras"? |
| 2012-08-09 13:38:39 -0600 | asked a question | Which machine vision camera vendors provide OpenCV support? I'm looking for high-quality machine vision cameras whose vendor provides support to OpenCV. To my knowledge, only XIMEA provides support. And about other major brands (AVT, PointGrey, Pixelink...)? I know it's not a problem for 1394 cameras, but I think USB3.0 and GigE cameras could become a headache without vendor support? Am I wrong? |
| 2012-07-30 07:21:00 -0600 | commented question | Is stereoRectifyUncalibrated efficient? What is the meaning of "better"? Less distortion? Better results on stereo computation? Fast performance? Could you show some images presenting examples? If you have problems with distortion, maybe the following question can help: http://answers.opencv.org/question/418/heavy-shearing-effects-using-hartleys/#677 |
| 2012-07-23 11:58:34 -0600 | received badge | ● Good Question (source) |
| 2012-07-23 11:58:24 -0600 | received badge | ● Self-Learner (source) |
| 2012-07-23 11:26:54 -0600 | received badge | ● Scholar (source) |
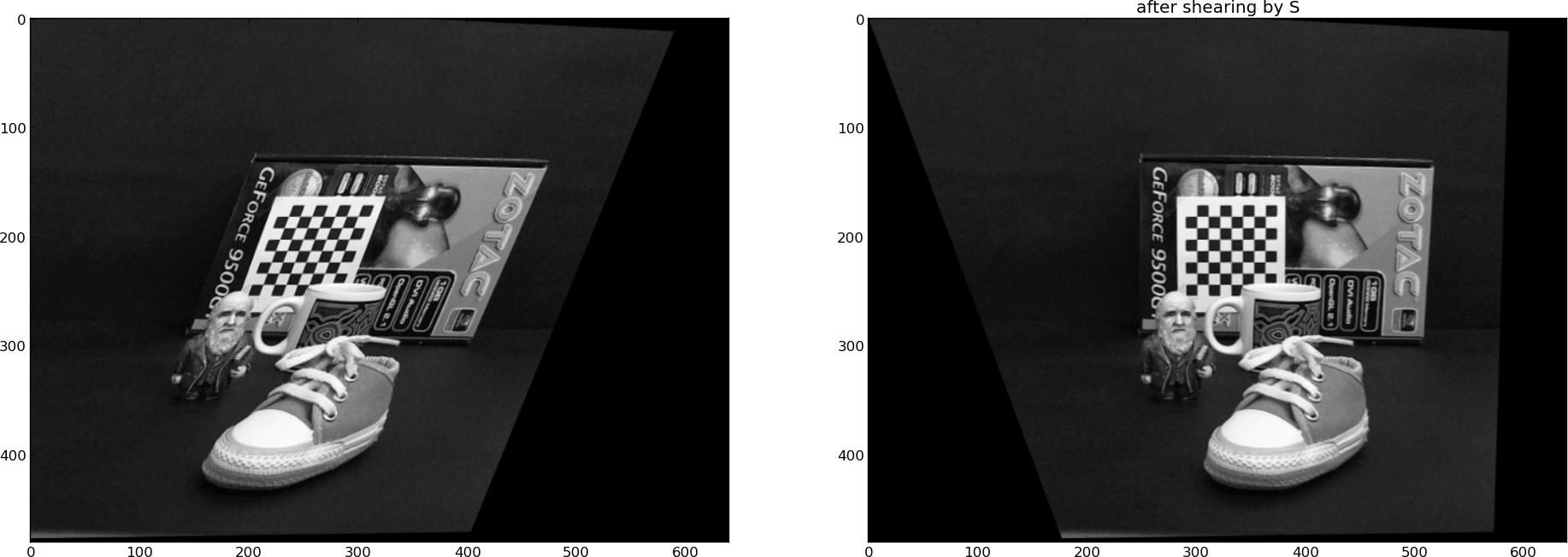
| 2012-07-23 11:26:38 -0600 | answered a question | Heavy shearing effects using Hartley's rectification Loop & Zhang present a solution in this paper. They use a shearing transform to reduce the distortion introduced by the projective transform that mapped the epipoles to infinity (ie, that made the epipolar lines parallel). Consider the shearing transform Let w and h be image width and height respectively. Consider the four midpoints of the image edges: According to Loop & Zhang:
Let According to Loop & Zhang:
The real solution presents a closed-form: up to sign (the positive is preferred). This is the result after applying shearing S on the left image:
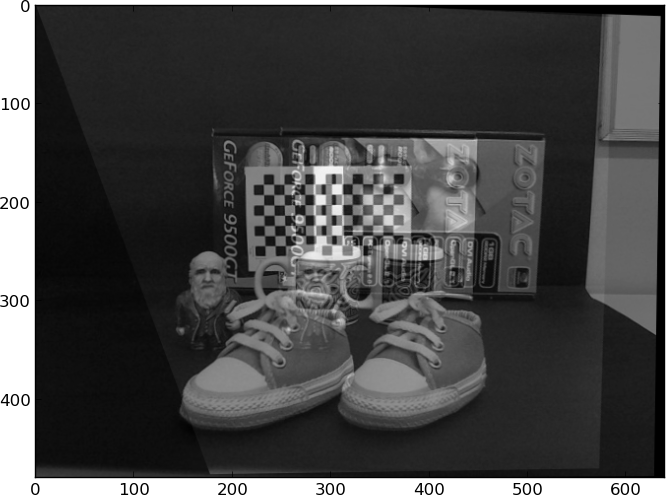
Now the left and right images overlaped:
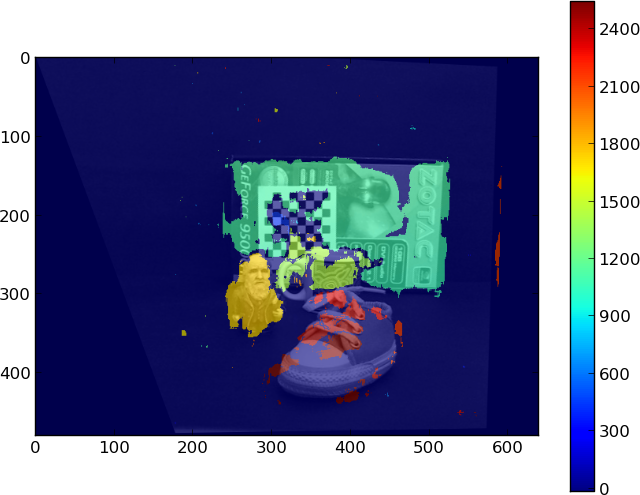
Finally, OpenCV stereo method
|
| 2012-07-18 04:25:02 -0600 | received badge | ● Nice Question (source) |
| 2012-07-18 03:17:42 -0600 | received badge | ● Notable Question (source) |
| 2012-07-17 04:50:10 -0600 | received badge | ● Popular Question (source) |
| 2012-07-17 02:15:40 -0600 | received badge | ● Student (source) |
| 2012-07-17 02:05:39 -0600 | received badge | ● Teacher (source) |
| 2012-07-16 17:55:45 -0600 | answered a question | Using Hue and Saturation to calculate Backprojection of an object This is a Python solution, but you can port it to C++ easily.
Compute the histogram: Finally:
|
| 2012-07-16 15:08:20 -0600 | asked a question | Heavy shearing effects using Hartley's rectification I'm using Consider these two input images (the points pairs were produced using SURF):
Hartley's algorithm produced these two rectified images:
The epipolar lines look fine. The following images shows some epipolar lines and a few point pairs:
The rectified SURF keypoints look fine too, consider the following small sample for inspection, d is disparity and erro is the difference between the y coordinate (zero for a perfect mapping): Now, the problem. The following image shows the two rectified images overlaped:
The ZOTAC word printed in the box is a good example. The word is in the same plane and, ideally, should present similar disparity. But the observed shearing will produce small disparities for "Z pixels" compared to disparities for "C pixels". Actually, it's not an OpenCV issue. I implemented Hartley's algorithm from scratch using Python and NumPy and got the same results. What is the matter with Hartley's algorithm? Can StereoBM handle this problem? Or have I made some mistake? |