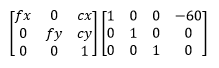
So, I have the projection matrix of the left camera:
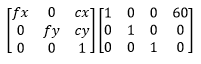
and the projection matrix of my right camera:
And when I perform triangulatePoints on the two vectors of corresponding points, I get the collection of points in 3D space.
All of the points in 3D space have a negative Z coordinate. I assume that the initial orientation of each camera is directed towards the positive Z axis.
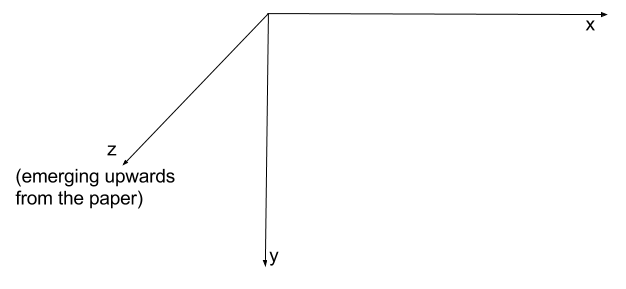
My assumption was that OpenCV uses coordinate axis like this:
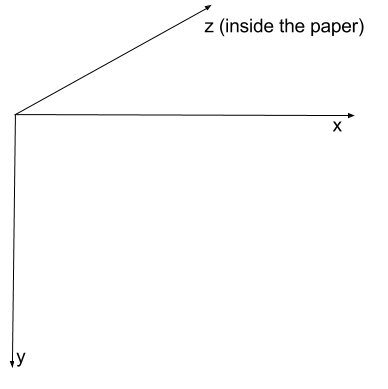
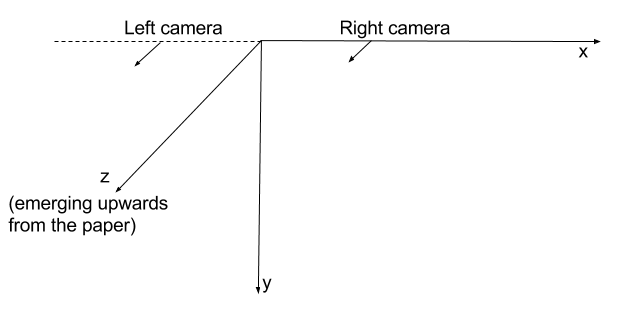
So, when I positioned my cameras with projection matrices, the complete picture would look like this:
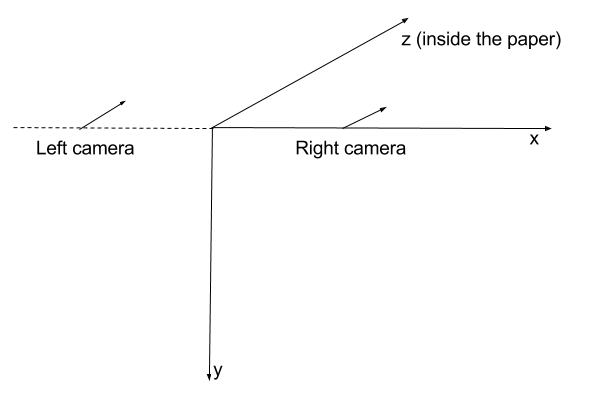
But my experiment leads me to believe that the coordinate system looks like this:
And that my projection matrices have effectively messed up the left and right concept:
Is everything I've said correct? Is the latter coordinate system really the one that is used by OpenCV?
