Are my Points coplanar?
Hi,
A while ago I worked on pose estimation. I also asked a question about it to make it work. (old question)
Today I read the following about POSIT (solvePNP) in Learning OpenCV 1st Edition
POSIT (aka “Pose from Orthography and Scaling with Iteration”) is an algorithm originally proposed in 1992 for computing the pose (the position T and orientation R described by six parameters [DeMenthon92]) of a 3D object whose exact dimensions are known. To compute this pose, we must find on the image the corresponding locations of at least four non-coplanar points on the surface of that object.
This is my image
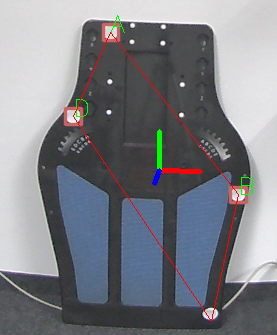{kind=link}
For me this points appear to be coplanar, since they are all in the same plane? Could someone explain to me why it works anyway?
In this document, it says:
You can read the original Posit paper if you want more information and the litterature on PnP problem.
Thanks for the sources. Am I understanding you correct, that you say, that my Points are coplanar but it works anyway because of a closed form solution?
Your points are coplanar (the 4 points lie more or less on the same plane) and as long as you are not in a degenerate configuration (3 collinear scene points for example), you can estimate the pose.
Thank you!