discontinuities in pointcloud after reprojectImageTo3D
Hi guys,
I'm doing the implementation of Efficient Large Scale Multi-View Stereo for Ultra High Resolution Image Sets in order to perform dense reconstruction with DAISY features.
The point is that given two rectified images

I compute the disparity map using the algorithm described in the paper

Finally, using reprojectImageTo3D() with disparity map and Q matrix obtained from previous image rectification I get the following pointcloud
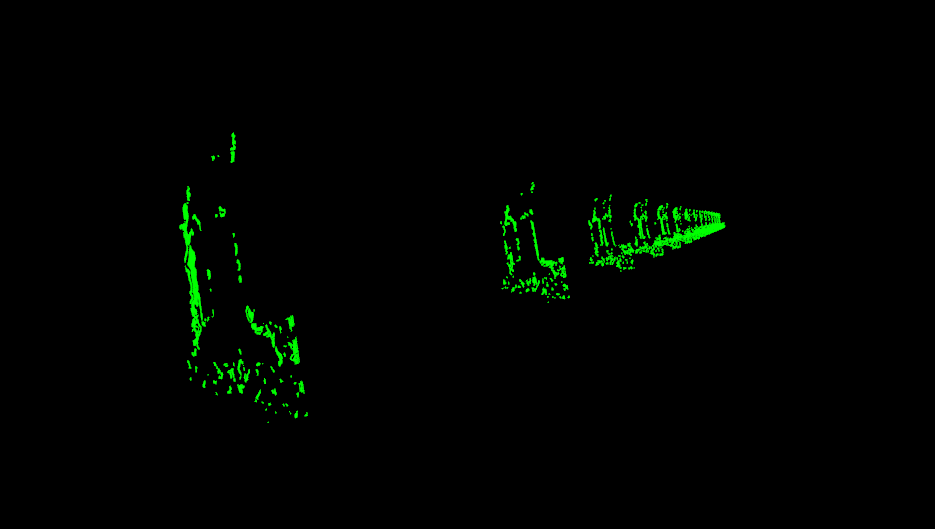
The above pointcloud has discontinuities in the camera Z (or disparity level).
I asked around and someone told me that I could have a data type error. My disparity map and Q matrices are CV_8U and CV_32F respectively. In reprojectImageTo3D I'm using the default parameters: reprojectImageTo3D(disparity_map, points3d, Q, false, -1);
Any suggestion?
Could you solve this Problem? Thanks in advance Hans