Markers on an image detection
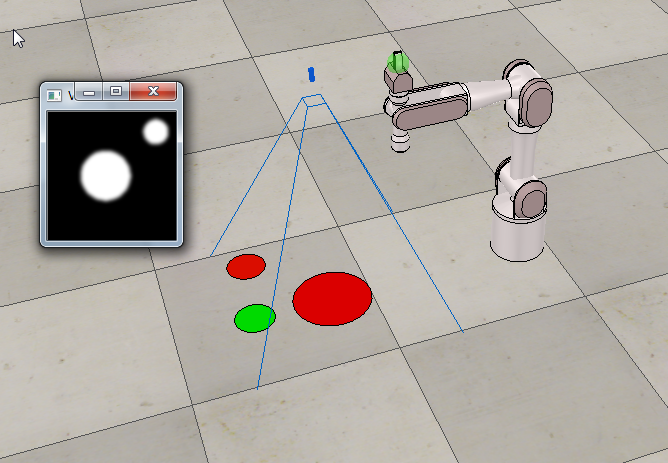
Hello. I am recieving a stream of images from a simulation program, called V-REP. The idea is that i have to detect only the red circles and determining their diameter, or something like this, to know the distance between my vision sensor and the circle. I managed to get the following result, so my algorithm sees only the red circles, ignoring the green one and anything else.
But I kind of got stuck, and I would need some help. Can you give me an idea?
Mat ocvimage;
ocvimage=cvCreateImage(cvSize(res[0], res[1]), 8, 3);
for (unsigned int i=0;i<res[1];i++){
for (unsigned int j=0;j<res[0];j++){
int r,g,b;
r=cvRound(255*imageBuffer[3*((res[1]-i)*res[0]+j)+0]);
g=cvRound(255*imageBuffer[3*((res[1]-i)*res[0]+j)+1]);
b=cvRound(255*imageBuffer[3*((res[1]-i)*res[0]+j)+2]);
ocvimage.at<Vec3b>(i,j)[0] = (uchar)b;
ocvimage.at<Vec3b>(i,j)[1] = (uchar)g;
ocvimage.at<Vec3b>(i,j)[2] = (uchar)r;
}
}
//Detecting red circles and marking them
Mat orig_image = ocvimage.clone();
medianBlur(ocvimage, ocvimage, 3);
Mat hsv_image;
cv::cvtColor(ocvimage, hsv_image, cv::COLOR_BGR2HSV);
cv::Mat lower_red_hue_range;
cv::Mat upper_red_hue_range;
cv::inRange(hsv_image, cv::Scalar(0, 100, 100), cv::Scalar(10, 255, 255), lower_red_hue_range);
cv::inRange(hsv_image, cv::Scalar(160, 100, 100), cv::Scalar(179, 255, 255), upper_red_hue_range);
cv::Mat red_hue_image;
cv::addWeighted(lower_red_hue_range, 1.0, upper_red_hue_range, 1.0, 0.0, red_hue_image);
cv::GaussianBlur(red_hue_image, red_hue_image, cv::Size(9, 9), 2, 2);
Thats my algorithm's main part, so far.
I had some heap memory troubles with HoughCircles, which I could not get around it, so I wanted to ask you guys for another approach.
Thanks!
add a comment