Corner vector of findChessboardCorners output too large?
So I'm trying to calibrate a camera using the tutorial code in calib3d and this tutorial. I keep getting the same error over and over (std::length_error at memory location) and I've traced it to where I try and add the corner vector given from findChessboardCorners to the image_Points vector in the last line of my code-- the corner vector is too large. Screenshot of corner vector size below:
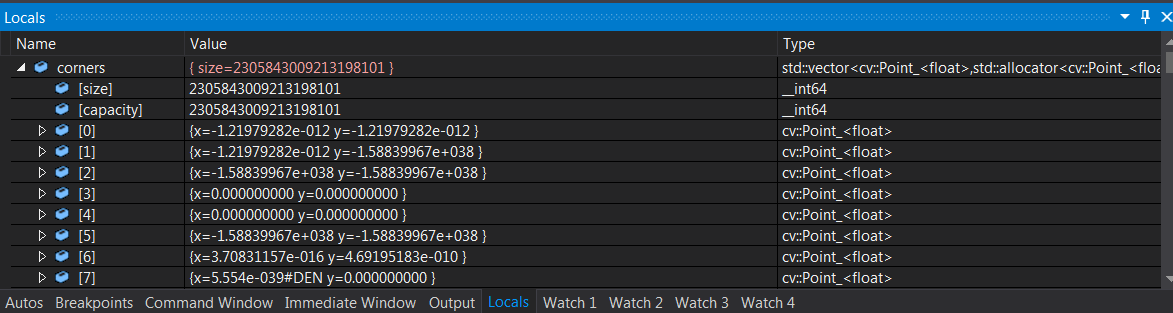
Stripped down tutorial code is below, though again I've isolated the problem to findChessboardCorners giving a seemingly nonsensical corner vector. The strange part is that there's no problem drawing the corners on the calibration image I'm using-- it appears as though the corners were calibrated perfectly. So what is the problem here? I really don't know why findChessboardCorners would be giving me such a large corner vector that I can't even add it to a list of vectors.
using namespace cv;
using namespace std;
int main(int argc, char** argv){
int numBoards = 1;
int numCornersHor=7;
int numCornersVer=5;
int numSquares = numCornersHor * numCornersVer;
Size board_sz = Size(numCornersHor, numCornersVer);
vector<vector<Point3f>> object_points;
vector<vector<Point2f>> image_points;
vector<Point2f> corners;
int successes = 0;
Mat large_image;
Mat image;
Mat gray_image;
large_image = imread(argv[1], IMREAD_COLOR);
resize(large_image, image, Size(), .5, .5);
vector<Point3f> obj;
for (int j = 0; j<numSquares; j++)
obj.push_back(Point3f((j / numCornersHor)*29, (j%numCornersHor)*29, 0.0f));
if (image.empty())
return(0);
else if (image.channels()>1)
cvtColor(image, gray_image, CV_BGR2GRAY);
else gray_image = image;
bool found = findChessboardCorners(image, board_sz, corners, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FAST_CHECK | CV_CALIB_CB_NORMALIZE_IMAGE);
if (found)
{
cornerSubPix(gray_image, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
drawChessboardCorners(gray_image, board_sz, corners, found);
}
imshow("win1", image);
imshow("win2", gray_image);
int key = waitKey(1);
if (key == 27)
return 0;
image_points.push_back(corners);
}