Stereo Calibration (HTC Evo 3D)
Hi,
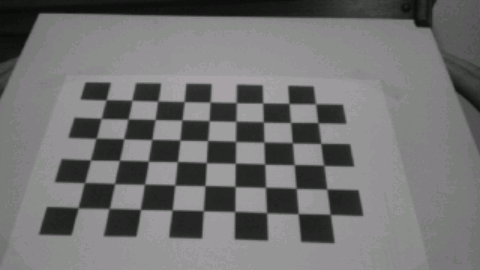
I try to calibrate the stereo camera of my Evo 3D. Therefore I use the stereo_calib.cpp sample and a set of stereo images:
Left:
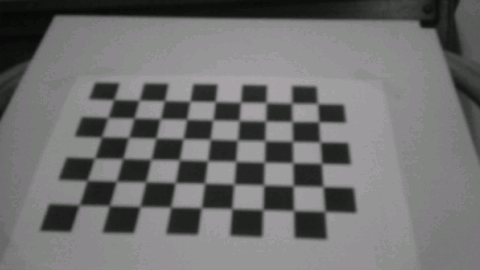
Right:
Result:
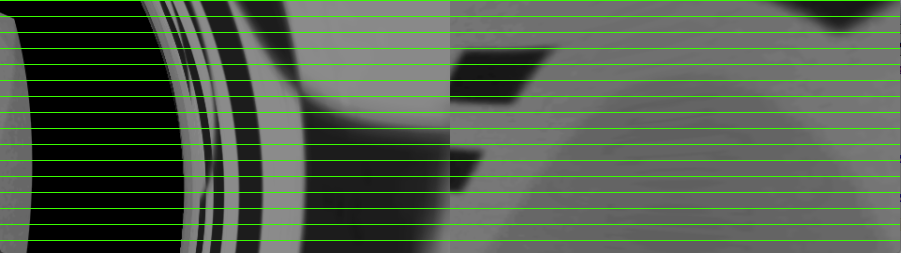
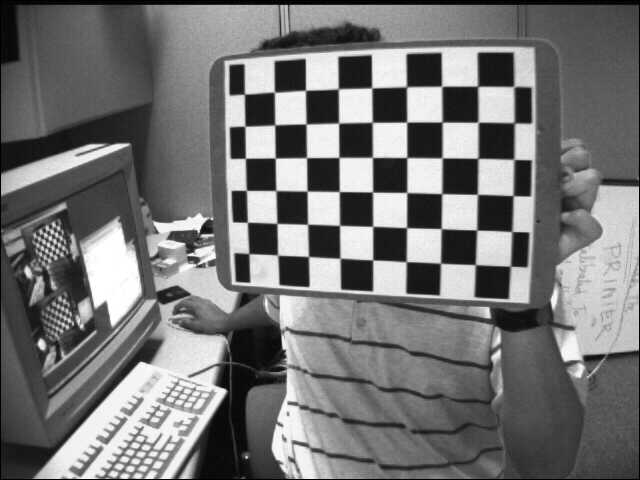
But as you can see the result is weird. When I use the sample images everything works fine:
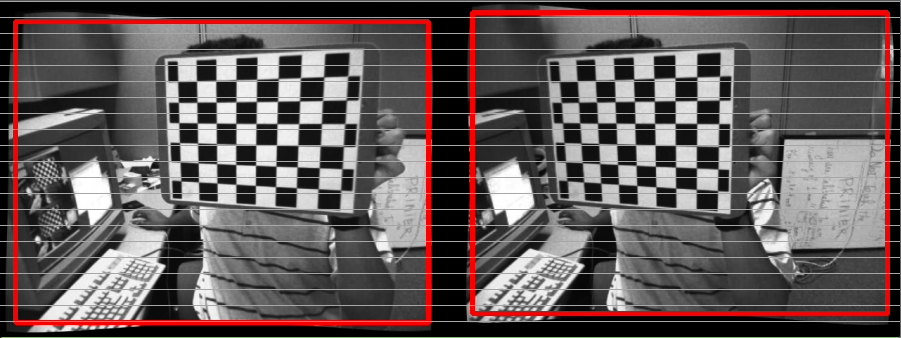
Somebody can tell me what I'm doing wrong? The images are of size 270x480 while the sample images are 480x640. Could this be a problem? And of course the quality of the second image is worse (HTC Evo problem). But for me it seems there is a general problem. Please help :)
Can you tell us how you are able to interface with your camera module? I have an HTC Evo 3D camera module and I would love to be able to use it in some applications that I'm developing. Are you using Android?
I have HTC Evo V 4G (similar to HTC Evo 3D). could you tell me how did you access both the cameras using OpenCV? I am not getting anywhere for a week or so..
Have you succeeded in camera calibration ? I am struggling with it right this moment and any help will be highly apprechiated. Best Regards.