Best method for multiple particle tracking with noise and possible overlap?
Hello, I am working on a school project where I want to track the number, direction, and velocity of particles moving across a flow chamber. I have a series of timestamped images which were taken under florescent light showing bright particles flowing over a view field.
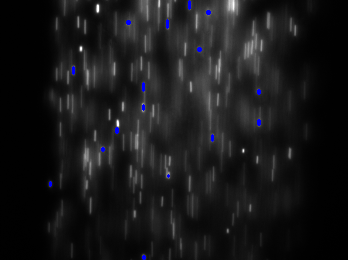
The particles I'm interested in tracking are the bright round dots (highlighted in green), while excluding motion blur from other particles that were not in focus.
Image Showing: Sample (green) vs Noise (red)
Here is a series of sample images from the data set: Sample Data
I have started working with both optical flow examples from the docs but they pick up all of the noise as tracks which I need to avoid. What method would you recommend for this application?
EDIT: Using the suggestion below I've added a tophat filter before running the sequence through an Lukas Kanade Motion Tracker. I just modified it slightly to return all of the tracks it picks up, and then I go through them to remove duplicates, and calculate velocities for each tracked particle.
This method still seems to pick up a lot of noise in the data, perhaps I haven't used optimal parameters for the LK filter?
lk_params = dict( winSize = (10, 10),
maxLevel = 5,
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
feature_params = dict( maxCorners = 3000,
qualityLevel = 0.5,
minDistance = 3,
blockSize = 3 )
class App:
def __init__(self, video_src):
self.track_len = 50
self.detect_interval = 1
self.tracks = []
self.allTracks = []
self.cam = video.create_capture(video_src)
self.frame_idx = 0
def run(self):
maxFrame = 10000
while True:
ret, frame = self.cam.read()
if frame == None:
break
if self.frame_idx > maxFrame:
break
if frame.shape[2] == 3:
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(4,4))
tophat1 = cv2.morphologyEx(frame, cv2.MORPH_TOPHAT, kernel)
ret, frame_gray = cv2.threshold(tophat1, 127, 255, cv2.THRESH_BINARY)
else: break
vis = cv2.cvtColor(frame_gray, cv2.COLOR_GRAY2BGR)
if len(self.tracks) > 0:
img0, img1 = self.prev_gray, frame_gray
p0 = np.float32([tr[-1] for tr in self.tracks]).reshape(-1, 1, 2)
p1, st, err = cv2.calcOpticalFlowPyrLK(img0, img1, p0, None, **lk_params)
p0r, st, err = cv2.calcOpticalFlowPyrLK(img1, img0, p1, None, **lk_params)
d = abs(p0-p0r).reshape(-1, 2).max(-1)
good = d < 1
new_tracks = []
for tr, (x, y), good_flag in zip(self.tracks, p1.reshape(-1, 2), good):
if not good_flag:
continue
tr.append((x, y))
if len(tr) > self.track_len:
del tr[0]
new_tracks.append(tr)
cv2.circle(vis, (x, y), 2, (0, 255, 0), -1)
self.tracks = new_tracks
cv2.polylines(vis, [np.int32(tr) for tr in self.tracks], False, (0, 255, 0))
draw_str(vis, (20, 20), 'track count: %d' % len(self.tracks))
if self.frame_idx % self.detect_interval == 0:
mask = np.zeros_like(frame_gray)
mask[:] = 255
for x, y in [np.int32(tr[-1]) for tr in self.tracks]:
cv2.circle(mask, (x, y), 5, 0, -1)
p = cv2.goodFeaturesToTrack(frame_gray, mask = mask, **feature_params)
if p is not None:
for x, y in np.float32(p).reshape(-1, 2):
self ...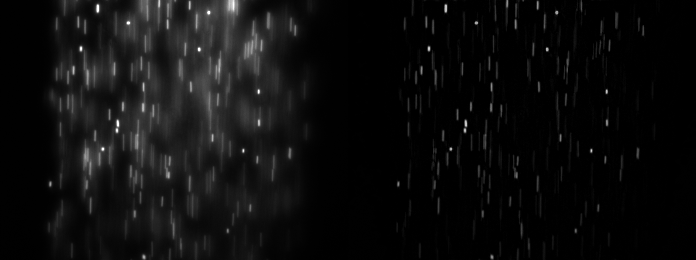 and
and

Any luck yet? I'm curious how you solve this.
I took your suggestion of using a top hat filter and implemented it before feeding the sequence to the LK tracker. I posted the code I'm now using in the edit above.
If you pick up a lot of noise, maybe you could have a look at blob tracking augmented with kalman filtering.