fail to calibrate fisheye camera
I try to calibrate my fisheye camera using the offical tools, but only get this
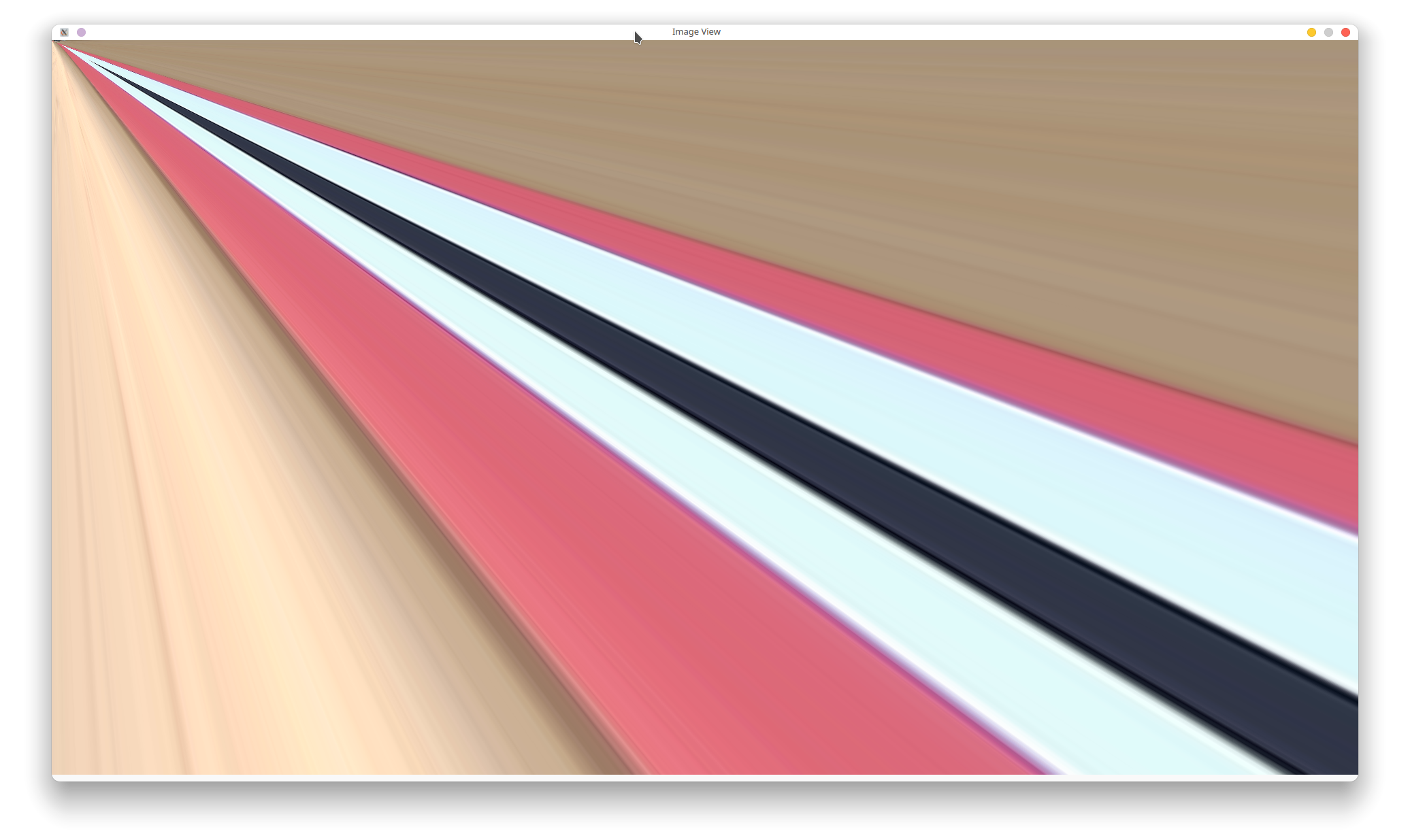
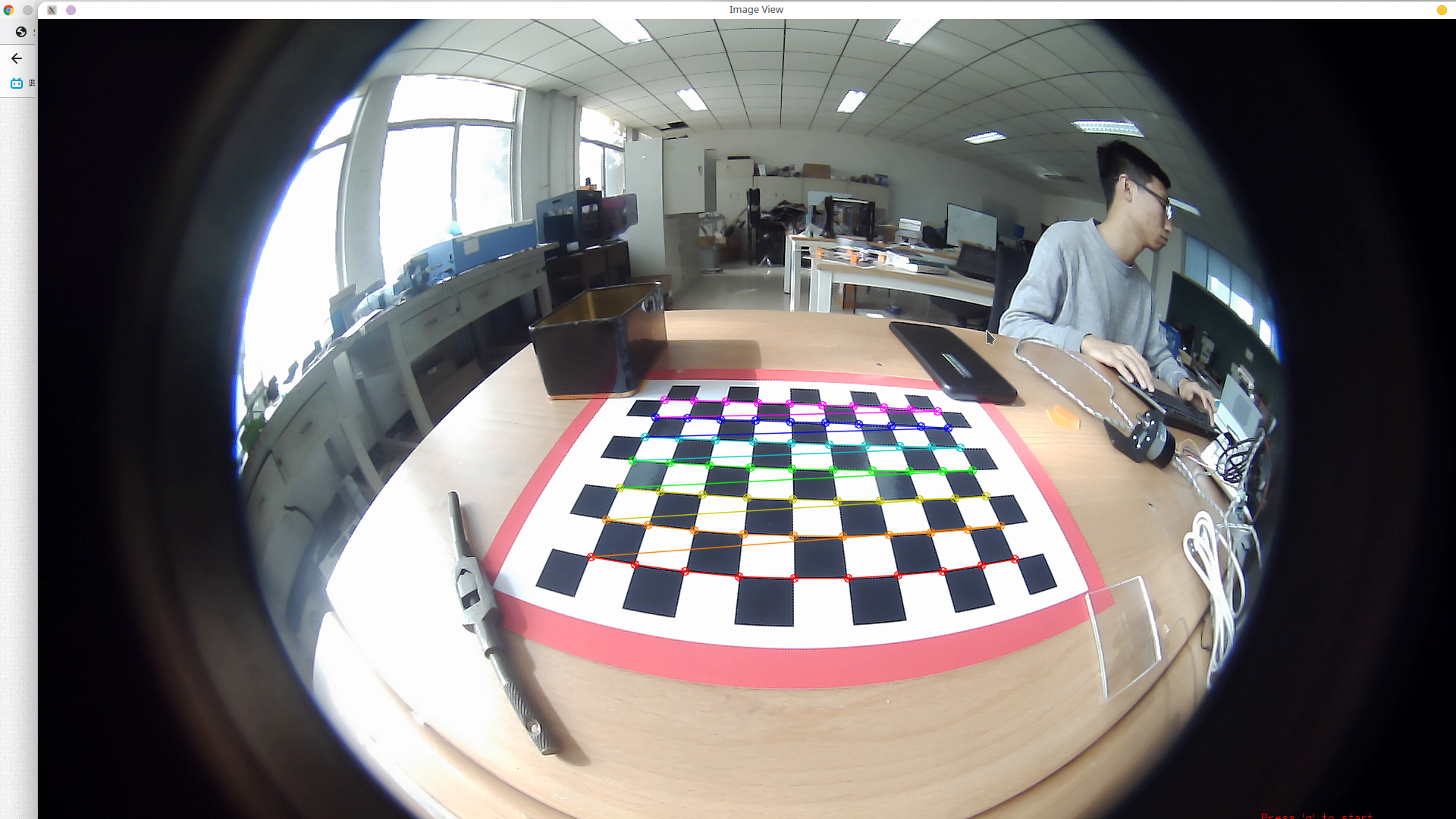
how to solve this? here is my XML file
{
<opencv_storage>
<Settings>
<!-- Number of inner corners per a item row and column. (square, circle) -->
<BoardSize_Width> 10</BoardSize_Width>
<BoardSize_Height>7</BoardSize_Height>
<!-- The size of a square in some user defined metric system (pixel, millimeter) -->
<Square_Size>50</Square_Size>
<!-- The type of input used for camera calibration. One of: CHESSBOARD CIRCLES_GRID ASYMMETRIC_CIRCLES_GRID -->
<Calibrate_Pattern>"CHESSBOARD"</Calibrate_Pattern>
<!-- The input to use for calibration.
To use an input camera -> give the ID of the camera, like "1"
To use an input video -> give the path of the input video, like "/tmp/x.avi"
To use an image list -> give the path to the XML or YAML file containing the list of the images, like "/tmp/circles_list.xml"
-->
<Input>"1"</Input>
<!-- If true (non-zero) we flip the input images around the horizontal axis. -->
<Input_FlipAroundHorizontalAxis>1</Input_FlipAroundHorizontalAxis>
<!-- Time delay between frames in case of camera. -->
<Input_Delay>100</Input_Delay>
<!-- How many frames to use, for calibration. -->
<Calibrate_NrOfFrameToUse>25</Calibrate_NrOfFrameToUse>
<!-- Consider only fy as a free parameter, the ratio fx/fy stays the same as in the input cameraMatrix.
Use or not setting. 0 - False Non-Zero - True -->
<Calibrate_FixAspectRatio> 1 </Calibrate_FixAspectRatio>
<!-- If true (non-zero) tangential distortion coefficients are set to zeros and stay zero. -->
<Calibrate_AssumeZeroTangentialDistortion>1</Calibrate_AssumeZeroTangentialDistortion>
<!-- If true (non-zero) the principal point is not changed during the global optimization. -->
<Calibrate_FixPrincipalPointAtTheCenter> 1 </Calibrate_FixPrincipalPointAtTheCenter>
<!-- The name of the output log file. -->
<Write_outputFileName>"out_camera_data.xml"</Write_outputFileName>
<!-- If true (non-zero) we write to the output file the feature points. -->
<Write_DetectedFeaturePoints>1</Write_Detected`enter code here`FeaturePoints>
<!-- If true (non-zero) we write to the output file the extrinsic camera parameters. -->
<Write_extrinsicParameters>1</Write_extrinsicParameters>
<!-- If true (non-zero) we write to the output file the refined 3D target grid points. -->
<Write_gridPoints>1</Write_gridPoints>
<!-- If true (non-zero) we show after calibration the undistorted images. -->
<Show_UndistortedImage>1</Show_UndistortedImage>
<!-- If true (non-zero) will be used fisheye camera model. -->
<Calibrate_UseFisheyeModel>1</Calibrate_UseFisheyeModel>
<!-- If true (non-zero) distortion coefficient k1 will be equals to zero. -->
<Fix_K1>0</Fix_K1>
<!-- If true (non-zero) distortion coefficient k2 will be equals to zero. -->
<Fix_K2>0</Fix_K2>
<!-- If true (non-zero) distortion coefficient k3 will be equals to zero. -->
<Fix_K3>0</Fix_K3>
<!-- If true (non-zero) distortion coefficient k4 will be equals to zero. -->
<Fix_K4>1</Fix_K4>
<!-- If true (non-zero) distortion coefficient k5 will be equals to zero. -->
<Fix_K5>1</Fix_K5>
</Settings>
</opencv_storage>
}
describe what exactly you did. post your code if you have any. make your problem reproducible to others. make sure that pasted code is readable (not this inline style but block style)