Is this calibration result normal?
I'm using camera_calibration.cpp to get camera matrix. I'm using these 13 images of chessboard pattern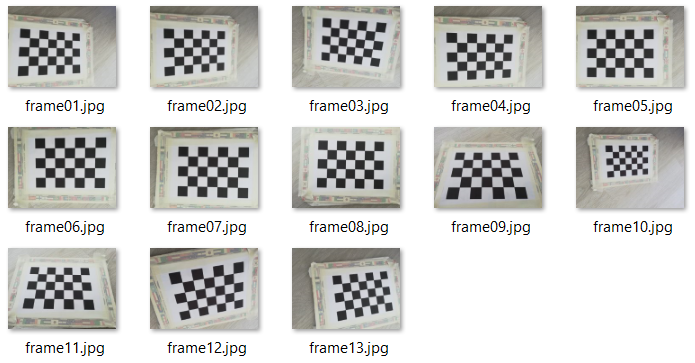
The result looks a bit weird to me, but I'm not sure. It seems like the program undistorts image too much, the corners don't look right and stretch chessboard cells sometimes, here's the example(lower left corner): 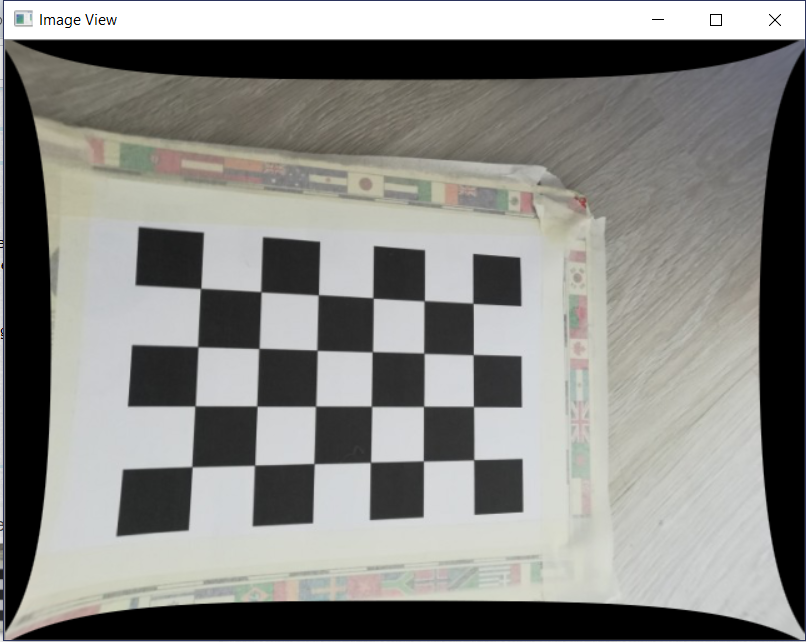
Average reprojection error is 0.225. This is the result if I use first, second and fifth distortion coefficients, since I'm not calculating tangential distortion(i used this as a guide). If i use the first three, like in the default .xml file the result looks like this 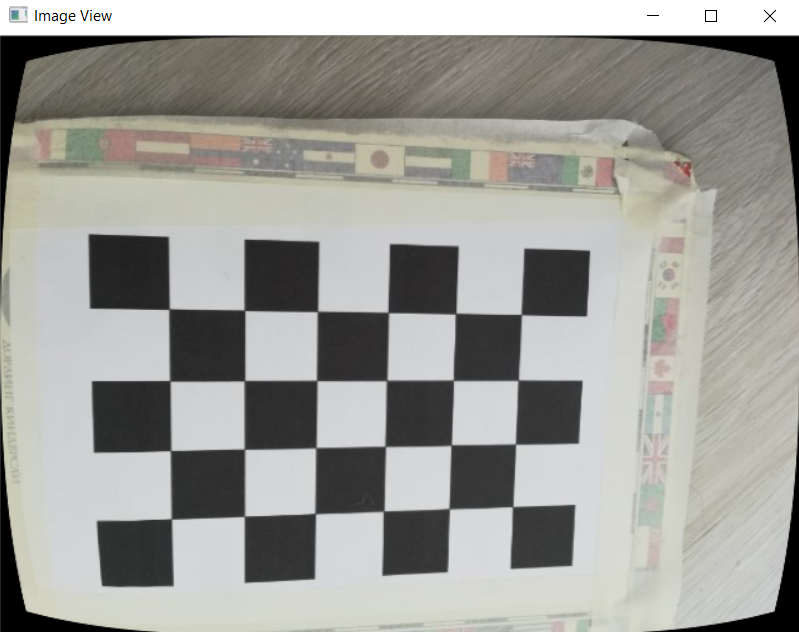
My question is: is this normal? If it isn't then what might be the problem? My end goal is to use this camera and it's matrix for 3D reconstruction and I'm afraid wrong calibration will mess everything up. Also, can I use intrinstic parameters I get here to calculate fundamental matrix and rectify two images taken by the same camera?
{kind=link}