Transposing movement points between a perspective camera and a mercator (isomorphic) map view
I’m wrestling with a question about whether I can take a perspective camera with movement points and transpose them onto a mercator map. I don't know if this is even possible without a 3D camera. As far as I can tell, a homography transformation could work, or a distance calculation for the points in the picture:

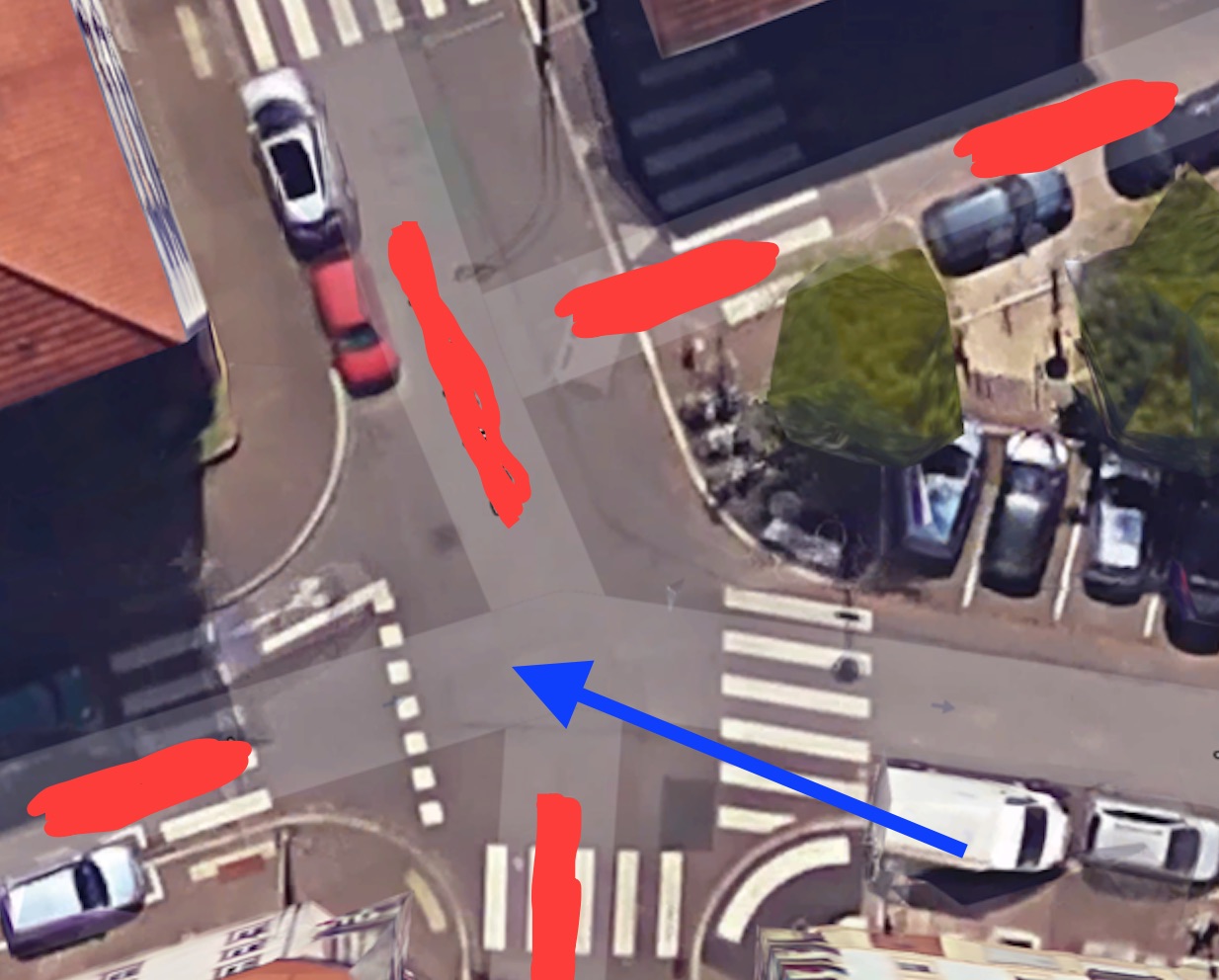
Can I map the tracking XY coordinates to a mercator view of the same street corner, assuming I can calculate the distance to the point by determining the height of the camera relative to the street corner and the focus point of the lens?
I'm looking for a general purpose strategy and/or algorithm that can serve as a starting point.

"Can I map the XY coordinates to a mercator view assuming distance?" Of course. Assuming distance. Which is a very large assumption. I don't think you have enough information here to do that. You need a depth camera, a moving camera, or knowledge about the geometry of the scene to project your points onto.
Would it be based on this formula? http://photo.stackexchange.com/questi...