This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
you can use the function below
// calculates distance between two points
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
also you can see an example code using this function here
| | 2 | No.2 Revision |
to calculate distance between two points you can use the function below
// calculates distance between two points
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
also you can see an example code using this function here
| | 3 | No.3 Revision |
to calculate distance between two points you can use the function below
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
also you can see an example code using this function here
EDIT : i learned from LBerger that norm function do it.
#include <opencv2/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// calculates distance between two points
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
int main( int argc, char** argv )
{
Point pt0(200,200);
Point pt1(100,100);
cout << "distanceBtwPoints result : " << distanceBtwPoints(pt0,pt1) << endl;
cout << "norm result " << norm(pt0-pt1);
}
| | 4 | No.4 Revision |
to calculate distance between two points you can use the function below
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
also you can see an example code using this function here
EDIT : i learned from LBerger that norm function do it.
#include <opencv2/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// calculates distance between two points
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
int main( int argc, char** argv )
{
Point pt0(200,200);
Point pt1(100,100);
cout << "distanceBtwPoints result : " << distanceBtwPoints(pt0,pt1) << endl;
cout << "norm result " << norm(pt0-pt1);
}
EDIT 2 :
look at the code below. maybe it help to get better result about finding edges.
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int, char**)
{
VideoCapture cap(0); // open the default camera
if(!cap.isOpened()) // check if we succeeded
return -1;
Mat edges;
namedWindow("edges",1);
for(;;)
{
Mat frame;
cap >> frame; // get a new frame from camera
cvtColor(frame, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(7,7), 1.5, 1.5);
Canny(edges, edges, 0, 30, 3);
imshow("edges", edges);
if(waitKey(30) >= 0) break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
| | 5 | No.5 Revision |
to calculate distance between two points you can use the function below
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
also you can see an example code using this function here
EDIT : i learned from LBerger that norm function do it.
#include <opencv2/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// calculates distance between two points
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
int main( int argc, char** argv )
{
Point pt0(200,200);
Point pt1(100,100);
cout << "distanceBtwPoints result : " << distanceBtwPoints(pt0,pt1) << endl;
cout << "norm result " << norm(pt0-pt1);
}
EDIT 2 :
look at the code below. maybe it help to get better result about finding edges.edges. next step will be findContours. you can find many examples about using findContours.
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int, char**)
{
VideoCapture cap(0); // open the default camera
if(!cap.isOpened()) // check if we succeeded
return -1;
Mat edges;
namedWindow("edges",1);
for(;;)
{
Mat frame;
cap >> frame; // get a new frame from camera
cvtColor(frame, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(7,7), 1.5, 1.5);
Canny(edges, edges, 0, 30, 3);
imshow("edges", edges);
if(waitKey(30) >= 0) break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
| | 6 | No.6 Revision |
to calculate distance between two points you can use the function below
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
also you can see an example code using this function here
EDIT : i learned from LBerger that norm function do it.
#include <opencv2/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// calculates distance between two points
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
int main( int argc, char** argv )
{
Point pt0(200,200);
Point pt1(100,100);
cout << "distanceBtwPoints result : " << distanceBtwPoints(pt0,pt1) << endl;
cout << "norm result " << norm(pt0-pt1);
}
EDIT 2 :
look at the code below. maybe it help to get better result about finding edges. next step will be findContours. you can find many examples about using findContours. like http://answers.opencv.org/question/71105.
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int, char**)
{
VideoCapture cap(0); // open the default camera
if(!cap.isOpened()) // check if we succeeded
return -1;
Mat edges;
namedWindow("edges",1);
for(;;)
{
Mat frame;
cap >> frame; // get a new frame from camera
cvtColor(frame, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(7,7), 1.5, 1.5);
Canny(edges, edges, 0, 30, 3);
imshow("edges", edges);
if(waitKey(30) >= 0) break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
| | 7 | No.7 Revision |
to calculate distance between two points you can use the function below
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
also you can see an example code using this function here
EDIT : i learned from LBerger that norm function do it.
#include <opencv2/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// calculates distance between two points
static double distanceBtwPoints(const cv::Point a, const cv::Point b)
{
double xDiff = a.x - b.x;
double yDiff = a.y - b.y;
return std::sqrt((xDiff * xDiff) + (yDiff * yDiff));
}
int main( int argc, char** argv )
{
Point pt0(200,200);
Point pt1(100,100);
cout << "distanceBtwPoints result : " << distanceBtwPoints(pt0,pt1) << endl;
cout << "norm result " << norm(pt0-pt1);
}
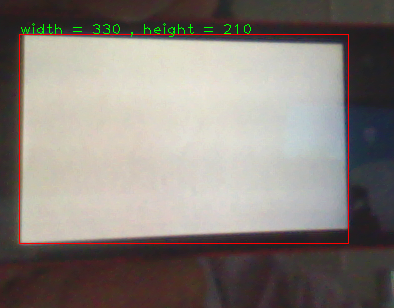
EDIT 2 2,3 :
look at the code below. maybe it help to get better result about finding edges. next step will be findContours. give you another idea using findContours and boundingRect you can find many examples about using findContours get widht and heigth of square objects like http://answers.opencv.org/question/71105.result image:
#include "opencv2/opencv.hpp"
using namespace cv;
using namespace std;
int main(int, char**)
{
VideoCapture cap(0); // open the default camera
if(!cap.isOpened()) // check if we succeeded
return -1;
Mat edges;
namedWindow("edges",1);
for(;;)
{
Mat frame;
cap >> frame; // get a new frame from camera
cvtColor(frame, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(7,7), 1.5, 1.5);
Canny(edges, edges, 0, 30, 50, 3);
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for( size_t i = 0; i < contours.size(); i++ )
{
Rect minRect = boundingRect(contours[i]);
if(minRect.width > 150 & minRect.height > 150 )
{
rectangle(frame,minRect,Scalar(0,0,255));
putText(frame,format("width = %d , height = %d",minRect.width,minRect.height), Point(minRect.x,minRect.y),
FONT_HERSHEY_PLAIN, 1, Scalar(0,255,0));
}
}
imshow("edges", edges);
frame);
if(waitKey(30) >= 0) break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
