This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I'm going to put the code I perform in order to pre-process a face. I do the following:
//Step 1: detect landmarks over the detected face
vector<cv::Point2d> landmarks = landmark_detector->detectLandmarks(img_gray,Rect(r.x,r.y,r.width,r.height));
//Step 2: align face
Mat aligned_image;
vector<cv::Point2d> aligned_landmarks;
aligner->align(img_gray,aligned_image,landmarks,aligned_landmarks);
//Step 3: normalize region
Mat normalized_region = normalizer->process(aligned_image,Rect(r.x,r.y,r.width,r.height),aligned_landmarks);
//Step 4: tan&&triggs
normalized_region = ((FlandMarkFaceAlign *)normalizer)->tan_triggs_preprocessing(normalized_region, gamma_correct,dog,contrast_eq);
Step 3 tries to get only "face region", and step 4 performs tang&&triggs.
I'm going to put the code for step 1 and 2.
STEP 1
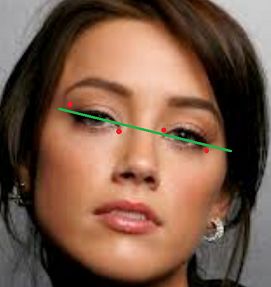
Step 1 calls a landmark detector. Flandmark detector is a good one (better than the one based on cascades for example). Flandmark detector returns the position of the landmarks in the image calling flandmarks, but also does an additional task:
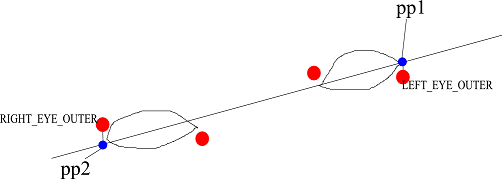
I create a line based on linear regresion using the four points for the eyes (LEFT_EYE_OUTER, LEFT_EYE_INNER, RIGHT_EYE_INNER, RIGHT_EYE_OUTER). Then i calculate two points based on this linear regrestion (the blue ones). (These points are called pp1 and pp2 in the code). I used this linear regresion class.
So, with the first step i get the following results:
The code is as follows:
vector<cv::Point2d> FlandmarkLandmarkDetection::detectLandmarks(const Mat & image, const Rect & face){
vector<Point2d> landmarks;
int bbox[4] = { face.x, face.y, face.x + face.width, face.y + face.height };
double *points = new double[2 * this->model->data.options.M];
if(flandmark_detect(new IplImage(image), bbox, this->model,points) > 0){
return landmarks;
}
for (int i = 0; i < this->model->data.options.M; i++) {
landmarks.push_back(Point2f(points[2 * i], points[2 * i + 1]));
}
LinearRegression lr;
lr.addPoint(Point2D(landmarks[LEFT_EYE_OUTER].x,landmarks[LEFT_EYE_OUTER].y));
lr.addPoint(Point2D(landmarks[LEFT_EYE_INNER].x,landmarks[LEFT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_INNER].x,landmarks[RIGHT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_OUTER].x,landmarks[RIGHT_EYE_OUTER].y));
double coef_determination = lr.getCoefDeterm();
double coef_correlation = lr.getCoefCorrel();
double standar_error_estimate = lr.getStdErrorEst();
double a = lr.getA();
double b = lr.getB();
cv::Point pp1(landmarks[LEFT_EYE_OUTER].x, landmarks[LEFT_EYE_OUTER].x*b+a);
cv::Point pp2(landmarks[RIGHT_EYE_OUTER].x, landmarks[RIGHT_EYE_OUTER].x*b+a);
landmarks.push_back(pp1); //landmarks[LEFT_EYE_ALIGN]
landmarks.push_back(pp2); //landmarks[RIGHT_EYE_ALIGN]
delete[] points;
points = 0;
return landmarks;
}
STEP 2
Step 2 aligns the face. It is based also on https://github.com/MasteringOpenCV/code/blob/master/Chapter8_FaceRecognition/preprocessFace.cpp
The code is as follows:
double FlandMarkFaceAlign::align(const Mat &image, Mat &dst_image, vector<Point2d> &landmarks, vector<Point2d> &dst_landmarks){
const double DESIRED_LEFT_EYE_X = 0.27; // Controls how much of the face is visible after preprocessing.
const double DESIRED_LEFT_EYE_Y = 0.4;
int desiredFaceWidth = 144;
int desiredFaceHeight = desiredFaceWidth;
Point2d leftEye = landmarks[LEFT_EYE_ALIGN];
Point2d rightEye = landmarks[RIGHT_EYE_ALIGN];
// Get the center between the 2 eyes.
Point2f eyesCenter = Point2f( (leftEye.x + rightEye.x) * 0.5f, (leftEye.y + rightEye.y) * 0.5f );
// Get the angle between the 2 eyes.
double dy = (rightEye.y - leftEye.y);
double dx = (rightEye.x - leftEye.x);
double len = sqrt(dx*dx + dy*dy);
double angle = atan2(dy, dx) * 180.0/CV_PI; // Convert from radians to degrees.
// Hand measurements shown that the left eye center should ideally be at roughly (0.19, 0.14) of a scaled face image.
const double DESIRED_RIGHT_EYE_X = (1.0f - DESIRED_LEFT_EYE_X);
// Get the amount we need to scale the image to be the desired fixed size we want.
double desiredLen = (DESIRED_RIGHT_EYE_X - DESIRED_LEFT_EYE_X) * desiredFaceWidth;
double scale = desiredLen / len;
// Get the transformation matrix for rotating and scaling the face to the desired angle & size.
Mat rot_mat = getRotationMatrix2D(eyesCenter, angle, scale);
// Shift the center of the eyes to be the desired center between the eyes.
rot_mat.at<double>(0, 2) += desiredFaceWidth * 0.5f - eyesCenter.x;
rot_mat.at<double>(1, 2) += desiredFaceHeight * DESIRED_LEFT_EYE_Y - eyesCenter.y;
// Rotate and scale and translate the image to the desired angle & size & position!
// Note that we use 'w' for the height instead of 'h', because the input face has 1:1 aspect ratio.
dst_image = Mat(desiredFaceHeight, desiredFaceWidth, CV_8U, Scalar(128)); // Clear the output image to a default grey.
warpAffine(image, dst_image, rot_mat, dst_image.size());
//don't forget to rotate landmarks also!!!
get_rotated_points(landmarks,dst_landmarks, rot_mat);
if(!dst_image.empty()){
//show landmarks
show_landmarks(dst_landmarks,dst_image,"rotate landmarks");
}
return angle;
}
void FlandMarkFaceAlign::get_rotated_points(const std::vector<cv::Point2d> &points, std::vector<cv::Point2d> &dst_points, const cv::Mat &rot_mat){
for(int i=0; i<points.size(); i++){
Mat point_original(3,1,CV_64FC1);
point_original.at<double>(0,0) = points[i].x;
point_original.at<double>(1,0) = points[i].y;
point_original.at<double>(2,0) = 1;
Mat result(2,1,CV_64FC1);
gemm(rot_mat,point_original, 1.0, cv::Mat(), 0.0, result);
Point point_result(cvRound(result.at<double>(0,0)),cvRound(result.at<double>(1,0)));
dst_points.push_back(point_result);
}
}
void FlandMarkFaceAlign::show_landmarks(const std::vector<cv::Point2d> &landmarks, const cv::Mat& image, const string &named_window){
Mat copy_image;
image.copyTo(copy_image);
for(int i=0; i<landmarks.size()-2; i++){
circle(copy_image,landmarks[i], 1,Scalar(255,0,0),2);
}
circle(copy_image,landmarks[LEFT_EYE_ALIGN], 1,Scalar(255,255,0),2);
circle(copy_image,landmarks[RIGHT_EYE_ALIGN], 1,Scalar(255,255,0),2);
}
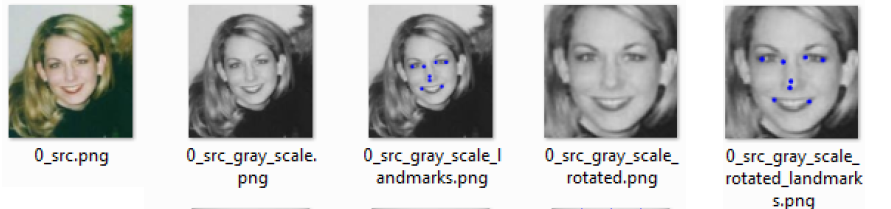
The final result is something like this:
| | 2 | No.2 Revision |
I'm going to put the code I perform in order to pre-process a face. I do the following:
//Step 1: detect landmarks over the detected face
vector<cv::Point2d> landmarks = landmark_detector->detectLandmarks(img_gray,Rect(r.x,r.y,r.width,r.height));
//Step 2: align face
Mat aligned_image;
vector<cv::Point2d> aligned_landmarks;
aligner->align(img_gray,aligned_image,landmarks,aligned_landmarks);
//Step 3: normalize region
Mat normalized_region = normalizer->process(aligned_image,Rect(r.x,r.y,r.width,r.height),aligned_landmarks);
//Step 4: tan&&triggs
normalized_region = ((FlandMarkFaceAlign *)normalizer)->tan_triggs_preprocessing(normalized_region, gamma_correct,dog,contrast_eq);
Step 3 tries to get only "face region", and step 4 performs tang&&triggs.
I'm going to put the code for step 1 and 2.
STEP 1
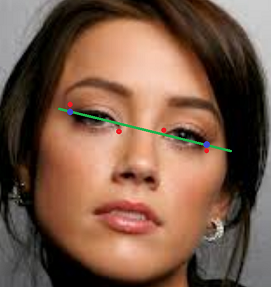
Step 1 calls a landmark detector. Flandmark detector is a good one (better than the one based on cascades for example). Flandmark detector returns the position of the landmarks in the image calling flandmarks, but also does an additional task:
I create a line based on linear regresion using the four points for the eyes (LEFT_EYE_OUTER, LEFT_EYE_INNER, RIGHT_EYE_INNER, RIGHT_EYE_OUTER). Then i calculate two points based on this linear regrestion (the blue ones). (These points are called pp1 and pp2 in the code). I used this linear regresion class.
I USED THESE TWO POINTS TO ROTATE THE FACE --> THESE POINTS ARE MORE ROBUST THAN USING FOR EXAMPLE LEFT_EYE_OUTER/RIGHT_EYE_OUTER OR LEFT_EYE_INNER/RIGHT_EYE_INNER
So, with the first step i get the following results:
The code is as follows:
vector<cv::Point2d> FlandmarkLandmarkDetection::detectLandmarks(const Mat & image, const Rect & face){
vector<Point2d> landmarks;
int bbox[4] = { face.x, face.y, face.x + face.width, face.y + face.height };
double *points = new double[2 * this->model->data.options.M];
if(flandmark_detect(new IplImage(image), bbox, this->model,points) > 0){
return landmarks;
}
for (int i = 0; i < this->model->data.options.M; i++) {
landmarks.push_back(Point2f(points[2 * i], points[2 * i + 1]));
}
LinearRegression lr;
lr.addPoint(Point2D(landmarks[LEFT_EYE_OUTER].x,landmarks[LEFT_EYE_OUTER].y));
lr.addPoint(Point2D(landmarks[LEFT_EYE_INNER].x,landmarks[LEFT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_INNER].x,landmarks[RIGHT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_OUTER].x,landmarks[RIGHT_EYE_OUTER].y));
double coef_determination = lr.getCoefDeterm();
double coef_correlation = lr.getCoefCorrel();
double standar_error_estimate = lr.getStdErrorEst();
double a = lr.getA();
double b = lr.getB();
cv::Point pp1(landmarks[LEFT_EYE_OUTER].x, landmarks[LEFT_EYE_OUTER].x*b+a);
cv::Point pp2(landmarks[RIGHT_EYE_OUTER].x, landmarks[RIGHT_EYE_OUTER].x*b+a);
landmarks.push_back(pp1); //landmarks[LEFT_EYE_ALIGN]
landmarks.push_back(pp2); //landmarks[RIGHT_EYE_ALIGN]
delete[] points;
points = 0;
return landmarks;
}
STEP 2
Step 2 aligns the face. It is based also on https://github.com/MasteringOpenCV/code/blob/master/Chapter8_FaceRecognition/preprocessFace.cpp
The code is as follows:
double FlandMarkFaceAlign::align(const Mat &image, Mat &dst_image, vector<Point2d> &landmarks, vector<Point2d> &dst_landmarks){
const double DESIRED_LEFT_EYE_X = 0.27; // Controls how much of the face is visible after preprocessing.
const double DESIRED_LEFT_EYE_Y = 0.4;
int desiredFaceWidth = 144;
int desiredFaceHeight = desiredFaceWidth;
Point2d leftEye = landmarks[LEFT_EYE_ALIGN];
Point2d rightEye = landmarks[RIGHT_EYE_ALIGN];
// Get the center between the 2 eyes.
Point2f eyesCenter = Point2f( (leftEye.x + rightEye.x) * 0.5f, (leftEye.y + rightEye.y) * 0.5f );
// Get the angle between the 2 eyes.
double dy = (rightEye.y - leftEye.y);
double dx = (rightEye.x - leftEye.x);
double len = sqrt(dx*dx + dy*dy);
double angle = atan2(dy, dx) * 180.0/CV_PI; // Convert from radians to degrees.
// Hand measurements shown that the left eye center should ideally be at roughly (0.19, 0.14) of a scaled face image.
const double DESIRED_RIGHT_EYE_X = (1.0f - DESIRED_LEFT_EYE_X);
// Get the amount we need to scale the image to be the desired fixed size we want.
double desiredLen = (DESIRED_RIGHT_EYE_X - DESIRED_LEFT_EYE_X) * desiredFaceWidth;
double scale = desiredLen / len;
// Get the transformation matrix for rotating and scaling the face to the desired angle & size.
Mat rot_mat = getRotationMatrix2D(eyesCenter, angle, scale);
// Shift the center of the eyes to be the desired center between the eyes.
rot_mat.at<double>(0, 2) += desiredFaceWidth * 0.5f - eyesCenter.x;
rot_mat.at<double>(1, 2) += desiredFaceHeight * DESIRED_LEFT_EYE_Y - eyesCenter.y;
// Rotate and scale and translate the image to the desired angle & size & position!
// Note that we use 'w' for the height instead of 'h', because the input face has 1:1 aspect ratio.
dst_image = Mat(desiredFaceHeight, desiredFaceWidth, CV_8U, Scalar(128)); // Clear the output image to a default grey.
warpAffine(image, dst_image, rot_mat, dst_image.size());
//don't forget to rotate landmarks also!!!
get_rotated_points(landmarks,dst_landmarks, rot_mat);
if(!dst_image.empty()){
//show landmarks
show_landmarks(dst_landmarks,dst_image,"rotate landmarks");
}
return angle;
}
void FlandMarkFaceAlign::get_rotated_points(const std::vector<cv::Point2d> &points, std::vector<cv::Point2d> &dst_points, const cv::Mat &rot_mat){
for(int i=0; i<points.size(); i++){
Mat point_original(3,1,CV_64FC1);
point_original.at<double>(0,0) = points[i].x;
point_original.at<double>(1,0) = points[i].y;
point_original.at<double>(2,0) = 1;
Mat result(2,1,CV_64FC1);
gemm(rot_mat,point_original, 1.0, cv::Mat(), 0.0, result);
Point point_result(cvRound(result.at<double>(0,0)),cvRound(result.at<double>(1,0)));
dst_points.push_back(point_result);
}
}
void FlandMarkFaceAlign::show_landmarks(const std::vector<cv::Point2d> &landmarks, const cv::Mat& image, const string &named_window){
Mat copy_image;
image.copyTo(copy_image);
for(int i=0; i<landmarks.size()-2; i++){
circle(copy_image,landmarks[i], 1,Scalar(255,0,0),2);
}
circle(copy_image,landmarks[LEFT_EYE_ALIGN], 1,Scalar(255,255,0),2);
circle(copy_image,landmarks[RIGHT_EYE_ALIGN], 1,Scalar(255,255,0),2);
}
The final result is something like this:
| | 3 | No.3 Revision |
I'm going to put the code I perform in order to pre-process a face. I do the following:
//Step 1: detect landmarks over the detected face
vector<cv::Point2d> landmarks = landmark_detector->detectLandmarks(img_gray,Rect(r.x,r.y,r.width,r.height));
//Step 2: align face
Mat aligned_image;
vector<cv::Point2d> aligned_landmarks;
aligner->align(img_gray,aligned_image,landmarks,aligned_landmarks);
//Step 3: normalize region
Mat normalized_region = normalizer->process(aligned_image,Rect(r.x,r.y,r.width,r.height),aligned_landmarks);
//Step 4: tan&&triggs
normalized_region = ((FlandMarkFaceAlign *)normalizer)->tan_triggs_preprocessing(normalized_region, gamma_correct,dog,contrast_eq);
Step 3 tries to get only "face region", and step 4 performs tang&&triggs.
I'm going to put the code for step 1 and 2.
STEP 1
Step 1 calls a landmark detector. Flandmark detector is a good one (better than the one based on cascades for example). Flandmark detector returns the position of the landmarks in the image calling flandmarks, but also does an additional task:
I create a line based on linear regresion using the four points for the eyes (LEFT_EYE_OUTER, LEFT_EYE_INNER, RIGHT_EYE_INNER, RIGHT_EYE_OUTER). Then i calculate two points based on this linear regrestion (the blue ones). (These points are called pp1 and pp2 in the code). I used this linear regresion class.
I USED THESE TWO POINTS TO ROTATE THE FACE --> THESE POINTS ARE MORE ROBUST THAN USING FOR EXAMPLE LEFT_EYE_OUTER/RIGHT_EYE_OUTER OR LEFT_EYE_INNER/RIGHT_EYE_INNER
So, with the first step i get the following results:
The code is as follows:
vector<cv::Point2d> FlandmarkLandmarkDetection::detectLandmarks(const Mat & image, const Rect & face){
vector<Point2d> landmarks;
int bbox[4] = { face.x, face.y, face.x + face.width, face.y + face.height };
double *points = new double[2 * this->model->data.options.M];
//http://cmp.felk.cvut.cz/~uricamic/flandmark/
if(flandmark_detect(new IplImage(image), bbox, this->model,points) > 0){
return landmarks;
}
for (int i = 0; i < this->model->data.options.M; i++) {
landmarks.push_back(Point2f(points[2 * i], points[2 * i + 1]));
}
LinearRegression lr;
lr.addPoint(Point2D(landmarks[LEFT_EYE_OUTER].x,landmarks[LEFT_EYE_OUTER].y));
lr.addPoint(Point2D(landmarks[LEFT_EYE_INNER].x,landmarks[LEFT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_INNER].x,landmarks[RIGHT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_OUTER].x,landmarks[RIGHT_EYE_OUTER].y));
double coef_determination = lr.getCoefDeterm();
double coef_correlation = lr.getCoefCorrel();
double standar_error_estimate = lr.getStdErrorEst();
double a = lr.getA();
double b = lr.getB();
cv::Point pp1(landmarks[LEFT_EYE_OUTER].x, landmarks[LEFT_EYE_OUTER].x*b+a);
cv::Point pp2(landmarks[RIGHT_EYE_OUTER].x, landmarks[RIGHT_EYE_OUTER].x*b+a);
landmarks.push_back(pp1); //landmarks[LEFT_EYE_ALIGN]
landmarks.push_back(pp2); //landmarks[RIGHT_EYE_ALIGN]
delete[] points;
points = 0;
return landmarks;
}
STEP 2
Step 2 aligns the face. It is based also on https://github.com/MasteringOpenCV/code/blob/master/Chapter8_FaceRecognition/preprocessFace.cpp
The code is as follows:
double FlandMarkFaceAlign::align(const Mat &image, Mat &dst_image, vector<Point2d> &landmarks, vector<Point2d> &dst_landmarks){
const double DESIRED_LEFT_EYE_X = 0.27; // Controls how much of the face is visible after preprocessing.
const double DESIRED_LEFT_EYE_Y = 0.4;
int desiredFaceWidth = 144;
int desiredFaceHeight = desiredFaceWidth;
Point2d leftEye = landmarks[LEFT_EYE_ALIGN];
Point2d rightEye = landmarks[RIGHT_EYE_ALIGN];
// Get the center between the 2 eyes.
Point2f eyesCenter = Point2f( (leftEye.x + rightEye.x) * 0.5f, (leftEye.y + rightEye.y) * 0.5f );
// Get the angle between the 2 eyes.
double dy = (rightEye.y - leftEye.y);
double dx = (rightEye.x - leftEye.x);
double len = sqrt(dx*dx + dy*dy);
double angle = atan2(dy, dx) * 180.0/CV_PI; // Convert from radians to degrees.
// Hand measurements shown that the left eye center should ideally be at roughly (0.19, 0.14) of a scaled face image.
const double DESIRED_RIGHT_EYE_X = (1.0f - DESIRED_LEFT_EYE_X);
// Get the amount we need to scale the image to be the desired fixed size we want.
double desiredLen = (DESIRED_RIGHT_EYE_X - DESIRED_LEFT_EYE_X) * desiredFaceWidth;
double scale = desiredLen / len;
// Get the transformation matrix for rotating and scaling the face to the desired angle & size.
Mat rot_mat = getRotationMatrix2D(eyesCenter, angle, scale);
// Shift the center of the eyes to be the desired center between the eyes.
rot_mat.at<double>(0, 2) += desiredFaceWidth * 0.5f - eyesCenter.x;
rot_mat.at<double>(1, 2) += desiredFaceHeight * DESIRED_LEFT_EYE_Y - eyesCenter.y;
// Rotate and scale and translate the image to the desired angle & size & position!
// Note that we use 'w' for the height instead of 'h', because the input face has 1:1 aspect ratio.
dst_image = Mat(desiredFaceHeight, desiredFaceWidth, CV_8U, Scalar(128)); // Clear the output image to a default grey.
warpAffine(image, dst_image, rot_mat, dst_image.size());
//don't forget to rotate landmarks also!!!
get_rotated_points(landmarks,dst_landmarks, rot_mat);
if(!dst_image.empty()){
//show landmarks
show_landmarks(dst_landmarks,dst_image,"rotate landmarks");
}
return angle;
}
void FlandMarkFaceAlign::get_rotated_points(const std::vector<cv::Point2d> &points, std::vector<cv::Point2d> &dst_points, const cv::Mat &rot_mat){
for(int i=0; i<points.size(); i++){
Mat point_original(3,1,CV_64FC1);
point_original.at<double>(0,0) = points[i].x;
point_original.at<double>(1,0) = points[i].y;
point_original.at<double>(2,0) = 1;
Mat result(2,1,CV_64FC1);
gemm(rot_mat,point_original, 1.0, cv::Mat(), 0.0, result);
Point point_result(cvRound(result.at<double>(0,0)),cvRound(result.at<double>(1,0)));
dst_points.push_back(point_result);
}
}
void FlandMarkFaceAlign::show_landmarks(const std::vector<cv::Point2d> &landmarks, const cv::Mat& image, const string &named_window){
Mat copy_image;
image.copyTo(copy_image);
for(int i=0; i<landmarks.size()-2; i++){
circle(copy_image,landmarks[i], 1,Scalar(255,0,0),2);
}
circle(copy_image,landmarks[LEFT_EYE_ALIGN], 1,Scalar(255,255,0),2);
circle(copy_image,landmarks[RIGHT_EYE_ALIGN], 1,Scalar(255,255,0),2);
}
The final result is something like this:
| | 4 | No.4 Revision |
I'm going to put the code I perform in order to pre-process a face. I do the following:
//Step 1: detect landmarks over the detected face
vector<cv::Point2d> landmarks = landmark_detector->detectLandmarks(img_gray,Rect(r.x,r.y,r.width,r.height));
//Step 2: align face
Mat aligned_image;
vector<cv::Point2d> aligned_landmarks;
aligner->align(img_gray,aligned_image,landmarks,aligned_landmarks);
//Step 3: normalize region
Mat normalized_region = normalizer->process(aligned_image,Rect(r.x,r.y,r.width,r.height),aligned_landmarks);
//Step 4: tan&&triggs
normalized_region = ((FlandMarkFaceAlign *)normalizer)->tan_triggs_preprocessing(normalized_region, gamma_correct,dog,contrast_eq);
Step 3 tries to get only "face region", and step 4 performs tang&&triggs.
I'm going to put the code for step 1 and 2.
STEP 1
Step 1 calls a landmark detector. Flandmark detector is a good one (better than the one based on cascades for example). Flandmark detector returns the position of the landmarks in the image calling flandmarks, but also does an additional task:
I create a line based on linear regresion using the four points for the eyes (LEFT_EYE_OUTER, LEFT_EYE_INNER, RIGHT_EYE_INNER, RIGHT_EYE_OUTER). Then i calculate two points based on this linear regrestion (the blue ones). (These points are called pp1 and pp2 in the code). I used this linear regresion class.
I USED THESE TWO POINTS TO ROTATE THE FACE --> THESE POINTS ARE MORE ROBUST THAN USING FOR EXAMPLE LEFT_EYE_OUTER/RIGHT_EYE_OUTER OR LEFT_EYE_INNER/RIGHT_EYE_INNER
So, with the first step i get the following results:
The code is as follows:
vector<cv::Point2d> FlandmarkLandmarkDetection::detectLandmarks(const Mat & image, const Rect & face){
vector<Point2d> landmarks;
int bbox[4] = { face.x, face.y, face.x + face.width, face.y + face.height };
double *points = new double[2 * this->model->data.options.M];
//http://cmp.felk.cvut.cz/~uricamic/flandmark/
if(flandmark_detect(new IplImage(image), bbox, this->model,points) > 0){
return landmarks;
}
for (int i = 0; i < this->model->data.options.M; i++) {
landmarks.push_back(Point2f(points[2 * i], points[2 * i + 1]));
}
LinearRegression lr;
lr.addPoint(Point2D(landmarks[LEFT_EYE_OUTER].x,landmarks[LEFT_EYE_OUTER].y));
lr.addPoint(Point2D(landmarks[LEFT_EYE_INNER].x,landmarks[LEFT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_INNER].x,landmarks[RIGHT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_OUTER].x,landmarks[RIGHT_EYE_OUTER].y));
double coef_determination = lr.getCoefDeterm();
double coef_correlation = lr.getCoefCorrel();
double standar_error_estimate = lr.getStdErrorEst();
double a = lr.getA();
double b = lr.getB();
cv::Point pp1(landmarks[LEFT_EYE_OUTER].x, landmarks[LEFT_EYE_OUTER].x*b+a);
cv::Point pp2(landmarks[RIGHT_EYE_OUTER].x, landmarks[RIGHT_EYE_OUTER].x*b+a);
landmarks.push_back(pp1); //landmarks[LEFT_EYE_ALIGN]
landmarks.push_back(pp2); //landmarks[RIGHT_EYE_ALIGN]
delete[] points;
points = 0;
return landmarks;
}
STEP 2
Step 2 aligns the face. It is based also on https://github.com/MasteringOpenCV/code/blob/master/Chapter8_FaceRecognition/preprocessFace.cpp
The code is as follows:
double FlandMarkFaceAlign::align(const Mat &image, Mat &dst_image, vector<Point2d> &landmarks, vector<Point2d> &dst_landmarks){
const double DESIRED_LEFT_EYE_X = 0.27; // Controls how much of the face is visible after preprocessing.
const double DESIRED_LEFT_EYE_Y = 0.4;
int desiredFaceWidth = 144;
int desiredFaceHeight = desiredFaceWidth;
Point2d leftEye = landmarks[LEFT_EYE_ALIGN];
Point2d rightEye = landmarks[RIGHT_EYE_ALIGN];
// Get the center between the 2 eyes.
Point2f eyesCenter = Point2f( (leftEye.x + rightEye.x) * 0.5f, (leftEye.y + rightEye.y) * 0.5f );
// Get the angle between the 2 eyes.
double dy = (rightEye.y - leftEye.y);
double dx = (rightEye.x - leftEye.x);
double len = sqrt(dx*dx + dy*dy);
double angle = atan2(dy, dx) * 180.0/CV_PI; // Convert from radians to degrees.
// Hand measurements shown that the left eye center should ideally be at roughly (0.19, 0.14) of a scaled face image.
const double DESIRED_RIGHT_EYE_X = (1.0f - DESIRED_LEFT_EYE_X);
// Get the amount we need to scale the image to be the desired fixed size we want.
double desiredLen = (DESIRED_RIGHT_EYE_X - DESIRED_LEFT_EYE_X) * desiredFaceWidth;
double scale = desiredLen / len;
// Get the transformation matrix for rotating and scaling the face to the desired angle & size.
Mat rot_mat = getRotationMatrix2D(eyesCenter, angle, scale);
// Shift the center of the eyes to be the desired center between the eyes.
rot_mat.at<double>(0, 2) += desiredFaceWidth * 0.5f - eyesCenter.x;
rot_mat.at<double>(1, 2) += desiredFaceHeight * DESIRED_LEFT_EYE_Y - eyesCenter.y;
// Rotate and scale and translate the image to the desired angle & size & position!
// Note that we use 'w' for the height instead of 'h', because the input face has 1:1 aspect ratio.
dst_image = Mat(desiredFaceHeight, desiredFaceWidth, CV_8U, Scalar(128)); // Clear the output image to a default grey.
warpAffine(image, dst_image, rot_mat, dst_image.size());
//don't forget to rotate landmarks also!!!
get_rotated_points(landmarks,dst_landmarks, rot_mat);
if(!dst_image.empty()){
//show landmarks
show_landmarks(dst_landmarks,dst_image,"rotate landmarks");
}
return angle;
}
void FlandMarkFaceAlign::get_rotated_points(const std::vector<cv::Point2d> &points, std::vector<cv::Point2d> &dst_points, const cv::Mat &rot_mat){
for(int i=0; i<points.size(); i++){
Mat point_original(3,1,CV_64FC1);
point_original.at<double>(0,0) = points[i].x;
point_original.at<double>(1,0) = points[i].y;
point_original.at<double>(2,0) = 1;
Mat result(2,1,CV_64FC1);
gemm(rot_mat,point_original, 1.0, cv::Mat(), 0.0, result);
Point point_result(cvRound(result.at<double>(0,0)),cvRound(result.at<double>(1,0)));
dst_points.push_back(point_result);
}
}
void FlandMarkFaceAlign::show_landmarks(const std::vector<cv::Point2d> &landmarks, const cv::Mat& image, const string &named_window){
Mat copy_image;
image.copyTo(copy_image);
for(int i=0; i<landmarks.size()-2; i++){
circle(copy_image,landmarks[i], 1,Scalar(255,0,0),2);
}
circle(copy_image,landmarks[LEFT_EYE_ALIGN], 1,Scalar(255,255,0),2);
circle(copy_image,landmarks[RIGHT_EYE_ALIGN], 1,Scalar(255,255,0),2);
}
The final result is something like this:
| | 5 | No.5 Revision |
I'm going to put the code I perform in order to pre-process a face. I do the following:
//Step 1: detect landmarks over the detected face
vector<cv::Point2d> landmarks = landmark_detector->detectLandmarks(img_gray,Rect(r.x,r.y,r.width,r.height));
//Step 2: align face
Mat aligned_image;
vector<cv::Point2d> aligned_landmarks;
aligner->align(img_gray,aligned_image,landmarks,aligned_landmarks);
//Step 3: normalize region
Mat normalized_region = normalizer->process(aligned_image,Rect(r.x,r.y,r.width,r.height),aligned_landmarks);
//Step 4: tan&&triggs
normalized_region = ((FlandMarkFaceAlign *)normalizer)->tan_triggs_preprocessing(normalized_region, gamma_correct,dog,contrast_eq);
Step 3 tries to get only "face region", and step 4 performs tang&&triggs.
I'm going to put the code for step 1 and 2.
STEP 1
Step 1 calls a landmark detector. Flandmark detector is a good one (better than the one based on cascades for example). Flandmark detector returns the position of the landmarks in the image calling flandmarks, but also does an additional task:
I create a line based on linear regresion using the four points for the eyes (LEFT_EYE_OUTER, LEFT_EYE_INNER, RIGHT_EYE_INNER, RIGHT_EYE_OUTER). Then i calculate two points based on this linear regrestion (the blue ones). (These points are called pp1 and pp2 in the code). I used this linear regresion class.
I USED THESE TWO POINTS TO ROTATE THE FACE --> THESE POINTS ARE MORE ROBUST THAN USING FOR EXAMPLE LEFT_EYE_OUTER/RIGHT_EYE_OUTER OR LEFT_EYE_INNER/RIGHT_EYE_INNER
So, with the first step i get the following results:
The code is as follows:
vector<cv::Point2d> FlandmarkLandmarkDetection::detectLandmarks(const Mat & image, const Rect & face){
vector<Point2d> landmarks;
int bbox[4] = { face.x, face.y, face.x + face.width, face.y + face.height };
double *points = new double[2 * this->model->data.options.M];
//http://cmp.felk.cvut.cz/~uricamic/flandmark/
if(flandmark_detect(new IplImage(image), bbox, this->model,points) > 0){
return landmarks;
}
for (int i = 0; i < this->model->data.options.M; i++) {
landmarks.push_back(Point2f(points[2 * i], points[2 * i + 1]));
}
LinearRegression lr;
lr.addPoint(Point2D(landmarks[LEFT_EYE_OUTER].x,landmarks[LEFT_EYE_OUTER].y));
lr.addPoint(Point2D(landmarks[LEFT_EYE_INNER].x,landmarks[LEFT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_INNER].x,landmarks[RIGHT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_OUTER].x,landmarks[RIGHT_EYE_OUTER].y));
double coef_determination = lr.getCoefDeterm();
double coef_correlation = lr.getCoefCorrel();
double standar_error_estimate = lr.getStdErrorEst();
double a = lr.getA();
double b = lr.getB();
cv::Point pp1(landmarks[LEFT_EYE_OUTER].x, landmarks[LEFT_EYE_OUTER].x*b+a);
cv::Point pp2(landmarks[RIGHT_EYE_OUTER].x, landmarks[RIGHT_EYE_OUTER].x*b+a);
landmarks.push_back(pp1); //landmarks[LEFT_EYE_ALIGN]
landmarks.push_back(pp2); //landmarks[RIGHT_EYE_ALIGN]
delete[] points;
points = 0;
return landmarks;
}
STEP 2
Step 2 aligns the face. It is based also on https://github.com/MasteringOpenCV/code/blob/master/Chapter8_FaceRecognition/preprocessFace.cpp
The code is as follows:
double FlandMarkFaceAlign::align(const Mat &image, Mat &dst_image, vector<Point2d> &landmarks, vector<Point2d> &dst_landmarks){
const double DESIRED_LEFT_EYE_X = 0.27; // Controls how much of the face is visible after preprocessing.
const double DESIRED_LEFT_EYE_Y = 0.4;
int desiredFaceWidth = 144;
int desiredFaceHeight = desiredFaceWidth;
Point2d leftEye = landmarks[LEFT_EYE_ALIGN];
Point2d rightEye = landmarks[RIGHT_EYE_ALIGN];
// Get the center between the 2 eyes.
Point2f eyesCenter = Point2f( (leftEye.x + rightEye.x) * 0.5f, (leftEye.y + rightEye.y) * 0.5f );
// Get the angle between the 2 eyes.
double dy = (rightEye.y - leftEye.y);
double dx = (rightEye.x - leftEye.x);
double len = sqrt(dx*dx + dy*dy);
double angle = atan2(dy, dx) * 180.0/CV_PI; // Convert from radians to degrees.
// Hand measurements shown that the left eye center should ideally be at roughly (0.19, 0.14) of a scaled face image.
const double DESIRED_RIGHT_EYE_X = (1.0f - DESIRED_LEFT_EYE_X);
// Get the amount we need to scale the image to be the desired fixed size we want.
double desiredLen = (DESIRED_RIGHT_EYE_X - DESIRED_LEFT_EYE_X) * desiredFaceWidth;
double scale = desiredLen / len;
// Get the transformation matrix for rotating and scaling the face to the desired angle & size.
Mat rot_mat = getRotationMatrix2D(eyesCenter, angle, scale);
// Shift the center of the eyes to be the desired center between the eyes.
rot_mat.at<double>(0, 2) += desiredFaceWidth * 0.5f - eyesCenter.x;
rot_mat.at<double>(1, 2) += desiredFaceHeight * DESIRED_LEFT_EYE_Y - eyesCenter.y;
// Rotate and scale and translate the image to the desired angle & size & position!
// Note that we use 'w' for the height instead of 'h', because the input face has 1:1 aspect ratio.
dst_image = Mat(desiredFaceHeight, desiredFaceWidth, CV_8U, Scalar(128)); // Clear the output image to a default grey.
warpAffine(image, dst_image, rot_mat, dst_image.size());
//don't forget to rotate landmarks also!!!
get_rotated_points(landmarks,dst_landmarks, rot_mat);
if(!dst_image.empty()){
//show landmarks
show_landmarks(dst_landmarks,dst_image,"rotate landmarks");
}
return angle;
}
void FlandMarkFaceAlign::get_rotated_points(const std::vector<cv::Point2d> &points, std::vector<cv::Point2d> &dst_points, const cv::Mat &rot_mat){
for(int i=0; i<points.size(); i++){
Mat point_original(3,1,CV_64FC1);
point_original.at<double>(0,0) = points[i].x;
point_original.at<double>(1,0) = points[i].y;
point_original.at<double>(2,0) = 1;
Mat result(2,1,CV_64FC1);
gemm(rot_mat,point_original, 1.0, cv::Mat(), 0.0, result);
Point point_result(cvRound(result.at<double>(0,0)),cvRound(result.at<double>(1,0)));
dst_points.push_back(point_result);
}
}
void FlandMarkFaceAlign::show_landmarks(const std::vector<cv::Point2d> &landmarks, const cv::Mat& image, const string &named_window){
Mat copy_image;
image.copyTo(copy_image);
for(int i=0; i<landmarks.size()-2; i++){
circle(copy_image,landmarks[i], 1,Scalar(255,0,0),2);
}
circle(copy_image,landmarks[LEFT_EYE_ALIGN], 1,Scalar(255,255,0),2);
circle(copy_image,landmarks[RIGHT_EYE_ALIGN], 1,Scalar(255,255,0),2);
}
The final result is something like this:
I modified the original values of DESIRED_LEFT_EYE_X and DESIRED_LEFT_EYE_Y from here because i want to get all the face. After, this step takes place i perform a "region normalizer" algorithm. that is based in another paper. This algorithm for face normalization is based on this paper: An experimental comparison of gender classification methods . And it is described in Table 1.
And some code was missing. I forgot to put an enum with the landmarks:
enum landmark_pos {
FACE_CENTER = 0,
LEFT_EYE_INNER = 1,
RIGHT_EYE_INNER = 2,
MOUTH_LEFT = 3,
MOUTH_RIGHT = 4,
LEFT_EYE_OUTER = 5,
RIGHT_EYE_OUTER = 6,
NOSE_CENTER = 7,
LEFT_EYE_ALIGN = 8, //pp1
RIGHT_EYE_ALIGN = 9 //pp2
};
| | 6 | No.6 Revision |
I'm going to put the code I perform in order to pre-process a face. I do the following:
//Step 1: detect landmarks over the detected face
vector<cv::Point2d> landmarks = landmark_detector->detectLandmarks(img_gray,Rect(r.x,r.y,r.width,r.height));
//Step 2: align face
Mat aligned_image;
vector<cv::Point2d> aligned_landmarks;
aligner->align(img_gray,aligned_image,landmarks,aligned_landmarks);
//Step 3: normalize region
Mat normalized_region = normalizer->process(aligned_image,Rect(r.x,r.y,r.width,r.height),aligned_landmarks);
//Step 4: tan&&triggs
normalized_region = ((FlandMarkFaceAlign *)normalizer)->tan_triggs_preprocessing(normalized_region, gamma_correct,dog,contrast_eq);
Step 3 tries to get only "face region", and step 4 performs tang&&triggs.
I'm going to put the code for step 1 and 2.
STEP 1
Step 1 calls a landmark detector. Flandmark detector is a good one (better than the one based on cascades for example). Flandmark detector returns the position of the landmarks in the image calling flandmarks, but also does an additional task:
I create a line based on linear regresion using the four points for the eyes (LEFT_EYE_OUTER, LEFT_EYE_INNER, RIGHT_EYE_INNER, RIGHT_EYE_OUTER). Then i calculate two points based on this linear regrestion (the blue ones). (These points are called pp1 and pp2 in the code). I used this linear regresion class.
I USED THESE TWO POINTS TO ROTATE THE FACE --> THESE POINTS ARE MORE ROBUST THAN USING FOR EXAMPLE LEFT_EYE_OUTER/RIGHT_EYE_OUTER OR LEFT_EYE_INNER/RIGHT_EYE_INNER
So, with the first step i get the following results:
The code is as follows:
vector<cv::Point2d> FlandmarkLandmarkDetection::detectLandmarks(const Mat & image, const Rect & face){
vector<Point2d> landmarks;
int bbox[4] = { face.x, face.y, face.x + face.width, face.y + face.height };
double *points = new double[2 * this->model->data.options.M];
//http://cmp.felk.cvut.cz/~uricamic/flandmark/
if(flandmark_detect(new IplImage(image), bbox, this->model,points) > 0){
return landmarks;
}
for (int i = 0; i < this->model->data.options.M; i++) {
landmarks.push_back(Point2f(points[2 * i], points[2 * i + 1]));
}
LinearRegression lr;
lr.addPoint(Point2D(landmarks[LEFT_EYE_OUTER].x,landmarks[LEFT_EYE_OUTER].y));
lr.addPoint(Point2D(landmarks[LEFT_EYE_INNER].x,landmarks[LEFT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_INNER].x,landmarks[RIGHT_EYE_INNER].y));
lr.addPoint(Point2D(landmarks[RIGHT_EYE_OUTER].x,landmarks[RIGHT_EYE_OUTER].y));
double coef_determination = lr.getCoefDeterm();
double coef_correlation = lr.getCoefCorrel();
double standar_error_estimate = lr.getStdErrorEst();
double a = lr.getA();
double b = lr.getB();
cv::Point pp1(landmarks[LEFT_EYE_OUTER].x, landmarks[LEFT_EYE_OUTER].x*b+a);
cv::Point pp2(landmarks[RIGHT_EYE_OUTER].x, landmarks[RIGHT_EYE_OUTER].x*b+a);
landmarks.push_back(pp1); //landmarks[LEFT_EYE_ALIGN]
landmarks.push_back(pp2); //landmarks[RIGHT_EYE_ALIGN]
delete[] points;
points = 0;
return landmarks;
}
STEP 2
Step 2 aligns the face. It is based also on https://github.com/MasteringOpenCV/code/blob/master/Chapter8_FaceRecognition/preprocessFace.cpp
The code is as follows:
double FlandMarkFaceAlign::align(const Mat &image, Mat &dst_image, vector<Point2d> &landmarks, vector<Point2d> &dst_landmarks){
const double DESIRED_LEFT_EYE_X = 0.27; // Controls how much of the face is visible after preprocessing.
const double DESIRED_LEFT_EYE_Y = 0.4;
int desiredFaceWidth = 144;
int desiredFaceHeight = desiredFaceWidth;
Point2d leftEye = landmarks[LEFT_EYE_ALIGN];
Point2d rightEye = landmarks[RIGHT_EYE_ALIGN];
// Get the center between the 2 eyes.
Point2f eyesCenter = Point2f( (leftEye.x + rightEye.x) * 0.5f, (leftEye.y + rightEye.y) * 0.5f );
// Get the angle between the 2 eyes.
double dy = (rightEye.y - leftEye.y);
double dx = (rightEye.x - leftEye.x);
double len = sqrt(dx*dx + dy*dy);
double angle = atan2(dy, dx) * 180.0/CV_PI; // Convert from radians to degrees.
// Hand measurements shown that the left eye center should ideally be at roughly (0.19, 0.14) of a scaled face image.
const double DESIRED_RIGHT_EYE_X = (1.0f - DESIRED_LEFT_EYE_X);
// Get the amount we need to scale the image to be the desired fixed size we want.
double desiredLen = (DESIRED_RIGHT_EYE_X - DESIRED_LEFT_EYE_X) * desiredFaceWidth;
double scale = desiredLen / len;
// Get the transformation matrix for rotating and scaling the face to the desired angle & size.
Mat rot_mat = getRotationMatrix2D(eyesCenter, angle, scale);
// Shift the center of the eyes to be the desired center between the eyes.
rot_mat.at<double>(0, 2) += desiredFaceWidth * 0.5f - eyesCenter.x;
rot_mat.at<double>(1, 2) += desiredFaceHeight * DESIRED_LEFT_EYE_Y - eyesCenter.y;
// Rotate and scale and translate the image to the desired angle & size & position!
// Note that we use 'w' for the height instead of 'h', because the input face has 1:1 aspect ratio.
dst_image = Mat(desiredFaceHeight, desiredFaceWidth, CV_8U, Scalar(128)); // Clear the output image to a default grey.
warpAffine(image, dst_image, rot_mat, dst_image.size());
//don't forget to rotate landmarks also!!!
get_rotated_points(landmarks,dst_landmarks, rot_mat);
if(!dst_image.empty()){
//show landmarks
show_landmarks(dst_landmarks,dst_image,"rotate landmarks");
}
return angle;
}
void FlandMarkFaceAlign::get_rotated_points(const std::vector<cv::Point2d> &points, std::vector<cv::Point2d> &dst_points, const cv::Mat &rot_mat){
for(int i=0; i<points.size(); i++){
Mat point_original(3,1,CV_64FC1);
point_original.at<double>(0,0) = points[i].x;
point_original.at<double>(1,0) = points[i].y;
point_original.at<double>(2,0) = 1;
Mat result(2,1,CV_64FC1);
gemm(rot_mat,point_original, 1.0, cv::Mat(), 0.0, result);
Point point_result(cvRound(result.at<double>(0,0)),cvRound(result.at<double>(1,0)));
dst_points.push_back(point_result);
}
}
void FlandMarkFaceAlign::show_landmarks(const std::vector<cv::Point2d> &landmarks, const cv::Mat& image, const string &named_window){
Mat copy_image;
image.copyTo(copy_image);
for(int i=0; i<landmarks.size()-2; i++){
circle(copy_image,landmarks[i], 1,Scalar(255,0,0),2);
}
circle(copy_image,landmarks[LEFT_EYE_ALIGN], 1,Scalar(255,255,0),2);
circle(copy_image,landmarks[RIGHT_EYE_ALIGN], 1,Scalar(255,255,0),2);
}
The final result is something like this:
I modified the original values of DESIRED_LEFT_EYE_X and DESIRED_LEFT_EYE_Y from here because i want to get all the face. After, this step takes place i perform a "region normalizer" algorithm. that is based in another paper. This algorithm for face normalization is based on this paper: An experimental comparison of gender classification methods . And it is described in Table 1.
And some code was missing. I forgot to put an enum with the landmarks:
enum landmark_pos {
FACE_CENTER = 0,
LEFT_EYE_INNER = 1,
RIGHT_EYE_INNER = 2,
MOUTH_LEFT = 3,
MOUTH_RIGHT = 4,
LEFT_EYE_OUTER = 5,
RIGHT_EYE_OUTER = 6,
NOSE_CENTER = 7,
LEFT_EYE_ALIGN = 8, //pp1
RIGHT_EYE_ALIGN = 9 //pp2
};
Source code can be downloaded from: http://pastebin.com/M0ZwHZ2p