This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I calculated the normals with:
Mat pcNormals;
Vec3d viewpoint_1(0, 0, 0);
computeNormalsPC3d(pc, pcNormals, 6, false, viewpoint_1);
Now the PLYs look like:
ply
format ascii 1.0
element vertex 38304
property float x
property float y
property float z
property float nx
property float ny
property float nz
end_header
0.000681958 -0.00157701 0.00381835 0.985197 0.0119866 -0.171006
....
And I tried the sample that you have refer.
But I don't unerstand the outputs... I have PointClouds of an object with different views. for example one cloud shows the object from the front and the next pointcloud from 10° different angle an so on (every pointcloud sees only one side of the object). After all i want a 3D pointcloud of the whole object from the single point clouds.
Now I add two pointclouds to the sample, than I use the result and add another pointcloud to the sample. but nothing happens.
sorry for the amateur questions - opencv is new for me.
| | 2 | No.2 Revision |
I calculated the normals with:
Mat pcNormals;
Vec3d viewpoint_1(0, 0, 0);
computeNormalsPC3d(pc, pcNormals, 6, false, viewpoint_1);
Now the PLYs look like:
ply
format ascii 1.0
element vertex 38304
property float x
property float y
property float z
property float nx
property float ny
property float nz
end_header
0.000681958 -0.00157701 0.00381835 0.985197 0.0119866 -0.171006
....
And I tried the sample that you have refer.
But I don't unerstand the outputs... I have PointClouds of an object with different views. for example one cloud shows the object from the front and the next pointcloud from 10° different angle an so on (every pointcloud sees only one side of the object). After all i want a 3D pointcloud of the whole object from the single point clouds.
Now I add two pointclouds to the sample, than I use the result and add another pointcloud to the sample. but nothing happens.
sorry for the amateur questions - opencv is new for me.
left - right
input 1 - input 2 - output
| | 3 | No.3 Revision |
I calculated the normals with:
Mat pcNormals;
Vec3d viewpoint_1(0, 0, 0);
computeNormalsPC3d(pc, pcNormals, 6, false, viewpoint_1);
Now the PLYs look like:
ply
format ascii 1.0
element vertex 38304
property float x
property float y
property float z
property float nx
property float ny
property float nz
end_header
0.000681958 -0.00157701 0.00381835 0.985197 0.0119866 -0.171006
....
And I tried the sample that you have refer.
But I don't unerstand the outputs... I have PointClouds of an object with different views. for example one cloud shows the object from the front and the next pointcloud from 10° different angle an so on (every pointcloud sees only one side of the object). After all i want a 3D pointcloud of the whole object from the single point clouds.
Now I add two pointclouds to the sample, than I use the result and add another pointcloud to the sample. but nothing happens.
sorry for the amateur questions - opencv is new for me.
left - right
input 1 - input 2 - output
| | 4 | No.4 Revision |
I calculated the normals with:
Mat pcNormals;
Vec3d viewpoint_1(0, 0, 0);
computeNormalsPC3d(pc, pcNormals, 6, false, viewpoint_1);
Now the PLYs look like:
ply
format ascii 1.0
element vertex 38304
property float x
property float y
property float z
property float nx
property float ny
property float nz
end_header
0.000681958 -0.00157701 0.00381835 0.985197 0.0119866 -0.171006
....
And I tried the sample that you have refer.
But I don't unerstand the outputs... I have PointClouds of an object with different views. for example one cloud shows the object from the front and the next pointcloud from 10° different angle an so on (every pointcloud sees only one side of the object). After all i want a 3D pointcloud of the whole object from the single point clouds.
Now I add two pointclouds to the sample, than I use the result and add another pointcloud to the sample. but nothing happens.
sorry for the amateur questions - opencv is new for me.
left - right
input 1 - input 2 - output
| | 5 | No.5 Revision |
I calculated the normals with:
Mat pcNormals;
Vec3d viewpoint_1(0, 0, 0);
computeNormalsPC3d(pc, pcNormals, 6, false, viewpoint_1);
Now the PLYs look like:
ply
format ascii 1.0
element vertex 38304
property float x
property float y
property float z
property float nx
property float ny
property float nz
end_header
0.000681958 -0.00157701 0.00381835 0.985197 0.0119866 -0.171006
....
And I tried the sample that you have refer.
But I don't unerstand the outputs... I have PointClouds of an object with different views. for example one cloud shows the object from the front and the next pointcloud from 10° different angle an so on (every pointcloud sees only one side of the object). After all i want a 3D pointcloud of the whole object from the single point clouds.
Now I add two pointclouds to the sample, than I use the result and add another pointcloud to the sample. but nothing happens.
sorry for the amateur questions - opencv is new for me.
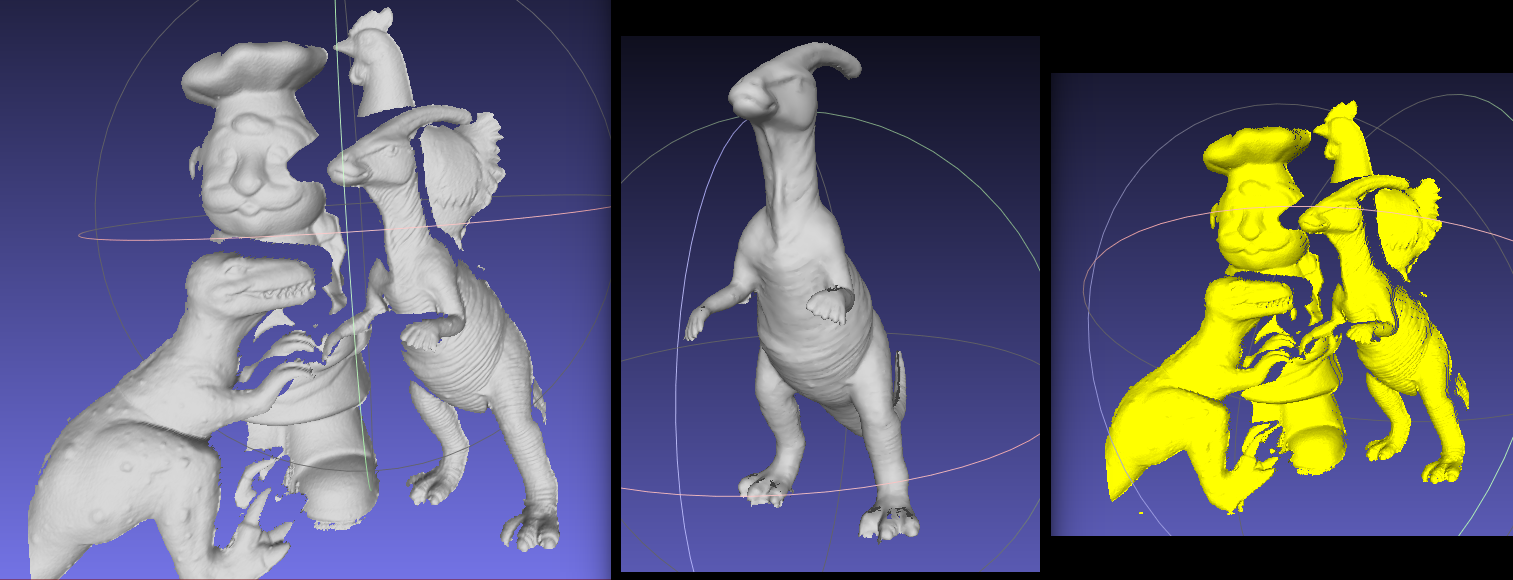
left - right
input 1 - input 2 - output
In my opinion, the dinosaur from the second image has to fit in to the scene, but this don't happen
| | 6 | No.6 Revision |
I calculated the normals with:
Mat pcNormals;
Vec3d viewpoint_1(0, 0, 0);
computeNormalsPC3d(pc, pcNormals, 6, false, viewpoint_1);
Now the PLYs look like:
ply
format ascii 1.0
element vertex 38304
property float x
property float y
property float z
property float nx
property float ny
property float nz
end_header
0.000681958 -0.00157701 0.00381835 0.985197 0.0119866 -0.171006
....
And I tried the sample that you have refer.
But I don't unerstand the outputs... I have PointClouds of an object with different views. for example one cloud shows the object from the front and the next pointcloud from 10° different angle an so on (every pointcloud sees only one side of the object). After all i want a 3D pointcloud of the whole object from the single point clouds.
Now I add two pointclouds to the sample, than I use the result and add another pointcloud to the sample. but nothing happens. The output is the first input as single points instead a constant surface
sorry for the amateur questions - opencv is new for me.
left - right
input 1 - input 2 - output
In my opinion, the dinosaur from the second image has to fit in to the scene, but this don't happen